The emergence of open source HD FPV video links has revolutionized the FPV community, offering enthusiasts more choices than ever. In this blog, we will explore the latest developments in OpenIPC, including its hardware options and performance insights based on the comprehensive review by Bardwell and MadsRC.
OpenIPC is HUGE
The significance of OpenIPC in the FPV world cannot be overstated. It represents a shift towards accessibility and customization, allowing users to create their systems without being tied to proprietary hardware or software. This is a game-changer for many hobbyists and professionals alike.
There are TWO systems being reviewed
OpenIPC introduces two notable systems that are currently available: one from Runcam and another from Emax. Each system brings unique features and capabilities to the table, appealing to different segments of the FPV community.

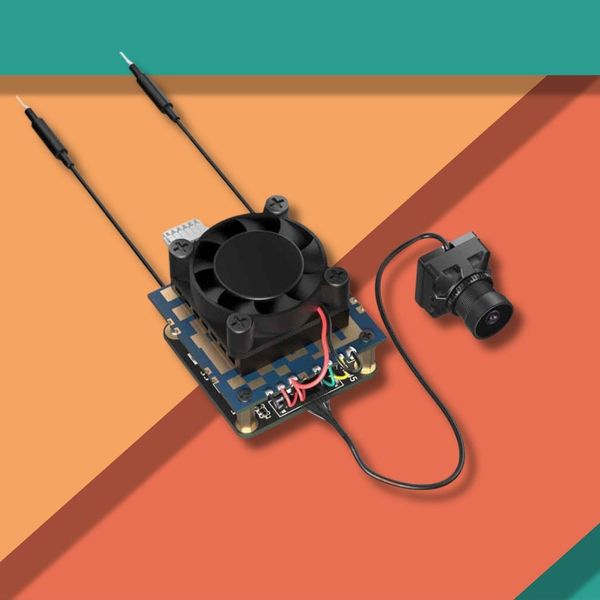
Why is it shaped like this?! (Runcam)
One of the first things you'll notice about the Runcam system is its unconventional design. The board is configured in a zigzag manner, rather than a straightforward stack. This design choice, while interesting, raises questions about practicality and ease of use.

This is NOT finished hardware
It’s essential to understand that the Runcam system is still in its alpha stage. While it is a significant step forward, it is not a polished product. Users should approach it with the mindset of experimenting and contributing to its development rather than expecting a complete, ready-to-use solution.

Disclaimer: I'm an OpenIPC newbie
As someone new to OpenIPC, it's crucial to clarify that my insights are based on the specific hardware being discussed. My experience is limited, and I encourage readers to explore the broader OpenIPC project for a more comprehensive understanding.
Runcam: overview of the video transmitter
The Runcam video transmitter is designed for versatility, operating within a wide voltage range. It’s equipped with a fan for cooling, which is necessary given its design. The two boards—one for video processing and another for radio transmission—work together to enhance performance.

Emax: vTX Overview
Transitioning to the Emax system, the video transmitter is compact and efficient. It operates at 800m and is designed to be user-friendly. Emax has also developed a nano-sized version, catering specifically to smaller drones, such as tiny whoops.

Emax: a nano-sized vTX for whoops!
The nano-sized Emax video transmitter is a remarkable innovation. Weighing just 11.5g, it’s perfect for lightweight builds. This design allows for easier integration into smaller drones while still maintaining solid performance.

Emax video receiver
Emax offers two types of video receivers, one operating at 100m and another at 2 Watts. This flexibility allows users to select the right combination for their setup, optimizing both transmission and reception. The biral nature of these systems means that the receiver also transmits back to the transmitter, enhancing overall communication.

No HDMI Out?!
One major limitation of the Runcam and Emax systems is the absence of an HDMI output. Instead, these systems utilize USB output, connecting directly to your smartphone via a USB OTG adapter. This design choice can be quite inconvenient, especially for those accustomed to the simplicity of HDMI connections.

Understanding the USB Connection
The functionality of the USB connection is facilitated through a dedicated app on your smartphone that acts as the video receiver. However, the effectiveness of this setup is highly dependent on the processing power of your smartphone. Newer models can achieve impressive latency, but older devices may struggle.

Latency: A Double-Edged Sword
Latency is a critical factor in FPV systems. With the Runcam setup, users can expect latencies as low as 25 milliseconds under optimal conditions. However, this can vary significantly depending on your hardware. While this latency is generally acceptable, it is not on par with high-end systems like DJI.

Ian even made an appearance, he is busy testing the Runcam unit at the moment.

Why Only 4 Mbps?!
The bit rate of 4 megabits per second may initially seem sufficient, but it raises concerns about image quality, particularly during dynamic motion. While static images may hold up well, moving images can suffer, leading to pixelation and glitches.

Comparative Bit Rate Analysis
For perspective, consider that systems like DJI operate at bit rates between 25 to 50 megabits per second. This stark difference highlights potential shortcomings in the Runcam and Emax systems, especially for fast-paced FPV flying.

No Channel Change or Auto Scan
Another drawback is the lack of a straightforward channel change feature. Currently, changing channels requires manual edits to a text file on the device. This cumbersome process can be a significant hurdle for users who need to adapt quickly in dynamic environments, such as racing or crowded fields.
Manual Channel Modification
To change the channel, you must remove the SD card, access it on a laptop, and modify the text file. This is far from ideal for a system that aims to be user-friendly.
Flight Test Setup
For the flight tests, an elaborate setup was used to ensure optimal recording quality. The receiver was connected to an adapter, which provided HDMI output to an HDMI splitter. This configuration allowed Bardwell to record high-quality footage while also viewing it live through his goggles.

Recording Challenges
During his initial tests, Bardwell faced significant challenges with recording quality. The app used for receiving video often produced glitchy recordings, which necessitated a more complex setup involving OBS on a laptop to capture the feed effectively.

Emax Flight Test
The Emax system performed reasonably well in Bardwells flight tests, but it also exhibited some notable issues. While the image quality was decent under bright conditions, the latency and occasional glitches made it less reliable for critical maneuvers.

Image Quality Observations
In terms of image quality, the Emax system held its own against the Runcam. However, both systems struggled with exposure settings, often resulting in darker footage despite bright conditions.

Runcam Flight Test
The Runcam system presented its own set of challenges. While it boasted a slightly brighter image, the glitches were more pronounced compared to the Emax system. This inconsistency raises concerns about its usability as a daily driver.

Glitching and Breakup Issues
During the Runcam test, Bardwell experienced significant breakup and glitching, particularly at longer ranges. This was disheartening, especially considering the promising specifications of the hardware.

Conclusion
In summary, while both the Runcam and Emax systems represent exciting developments in the open source HD FPV video link space, they are not without their flaws. The absence of HDMI output, limited bit rates, and cumbersome channel changing processes highlight the need for further refinement.

As these systems evolve, they hold the potential to become more competitive with established brands like DJI and Walksnail. For now, they serve as a testament to the innovative spirit of the FPV community, inviting enthusiasts to contribute and improve upon existing technologies.