
Betaflight 4.6 hasn’t landed yet, but it’s already stirring the pot with two headline features: position hold (POSHOLD) and altitude hold (ALTHOLD). These features, long awaited by the FPV drone crowd, promise to keep your drone from drifting off like a drunken sailor—finally adding a bit of autopilot to your freestyle madness.
Here’s the TL;DR: flashing the pre-release Betaflight 4.6 is a bit fiddly, you’ll want the new Configurator 11.0 or its web version, and you’ll need to tweak some settings—especially if your drone lacks a compass. The good news? Position hold can work surprisingly well without one. The catch? You’ll need to fly straight for a bit to calibrate your heading. Strap in.
Flashing Betaflight 4.6: Jumping Through Hoops
Betaflight 4.6 isn’t officially out, so flashing it means venturing into beta territory. That means bugs, unfinished features, and the potential for your drone to throw a tantrum mid-flight. Joshua Bardwell, the man behind the guide, usually avoids pre-release hype for these reasons. But the allure of POSHOLD and ALTHOLD was too strong.
To flash 4.6, you’ll need Betaflight Configurator 11.0, which isn’t yet in the stable release. Instead of installing a possibly unstable new Configurator version, Bardwell recommends using the online Betaflight Configurator running in a Chromium-based browser. It’s the freshest build and mandatory for 4.6 flashing.
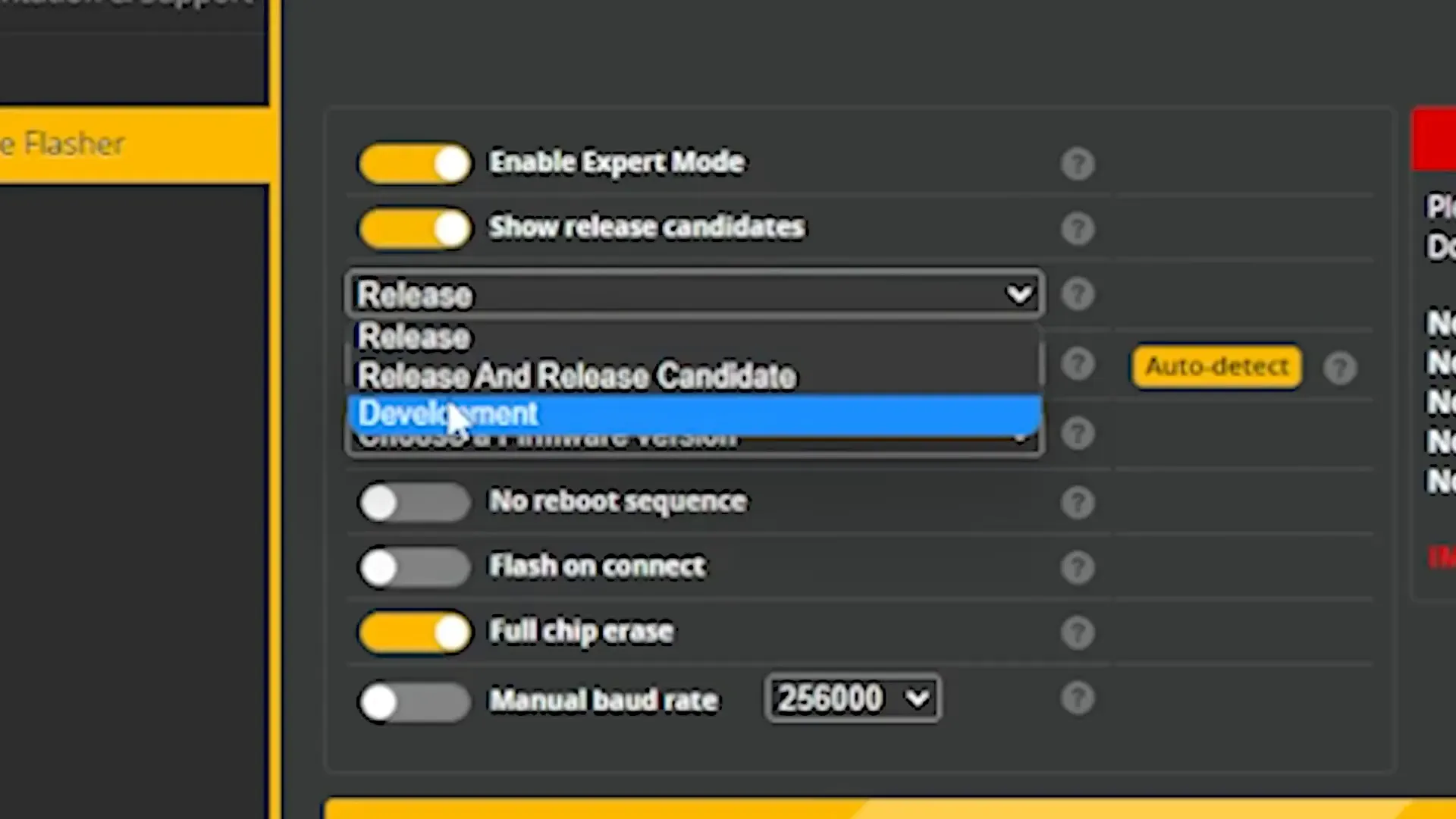
Once in Configurator 11.0, enable expert mode and “show release candidates” to unlock the BetaFlight 4.6 dev build. Put your flight controller into DFU mode (hold the bootloader button), select the correct target for your board, then choose BetaFlight 4.6.0 dev firmware. But wait—there’s more.
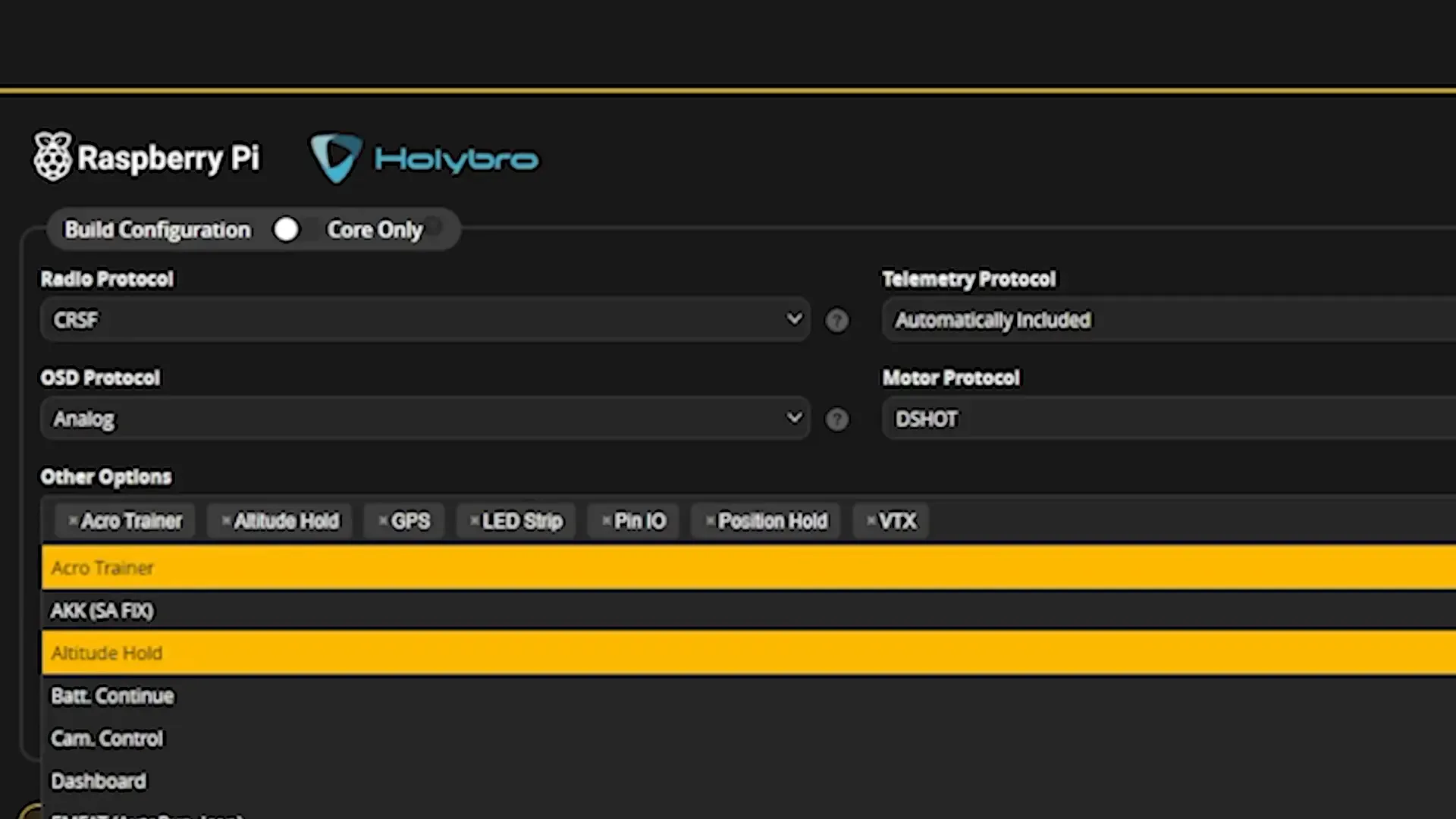
Altitude hold and position hold aren’t enabled by default in the build. You’ll need to tick those options manually in the build configuration before flashing. If your GPS has a compass (magnetometer), enable magnetometer support here as well. Otherwise, skip it. Bardwell’s test rig has no compass, so he leaves it unchecked.
Why Betaflight’s Position Hold Works Without a Compass (Mostly)
Traditionally, position hold requires a compass to know which way the drone is facing. GPS alone tells you your position but not your heading. Without a compass, the drone can’t decide whether to roll left or pitch forward to correct drift—unless it assumes the direction it’s moving is the direction it’s facing.
This assumption usually holds for airplanes, which don’t slide sideways or reverse, and it’s mostly true for multirotors in normal flight. Betaflight borrows this logic, letting you enable position hold without a compass. The trade-off is that if you hover or fly sideways for a while, the heading estimate drifts and position hold accuracy degrades.
For those who want to geek out, INAV added this compass-less feature years ago. Betaflight is just catching up.
Configuring Modes: Altitude Hold and Position Hold
After flashing, connect to your flight controller and, if you’re feeling brave, paste your old Betaflight 4.5 config into 4.6. This is risky—some settings might break—but it saves time if you know what you’re doing.
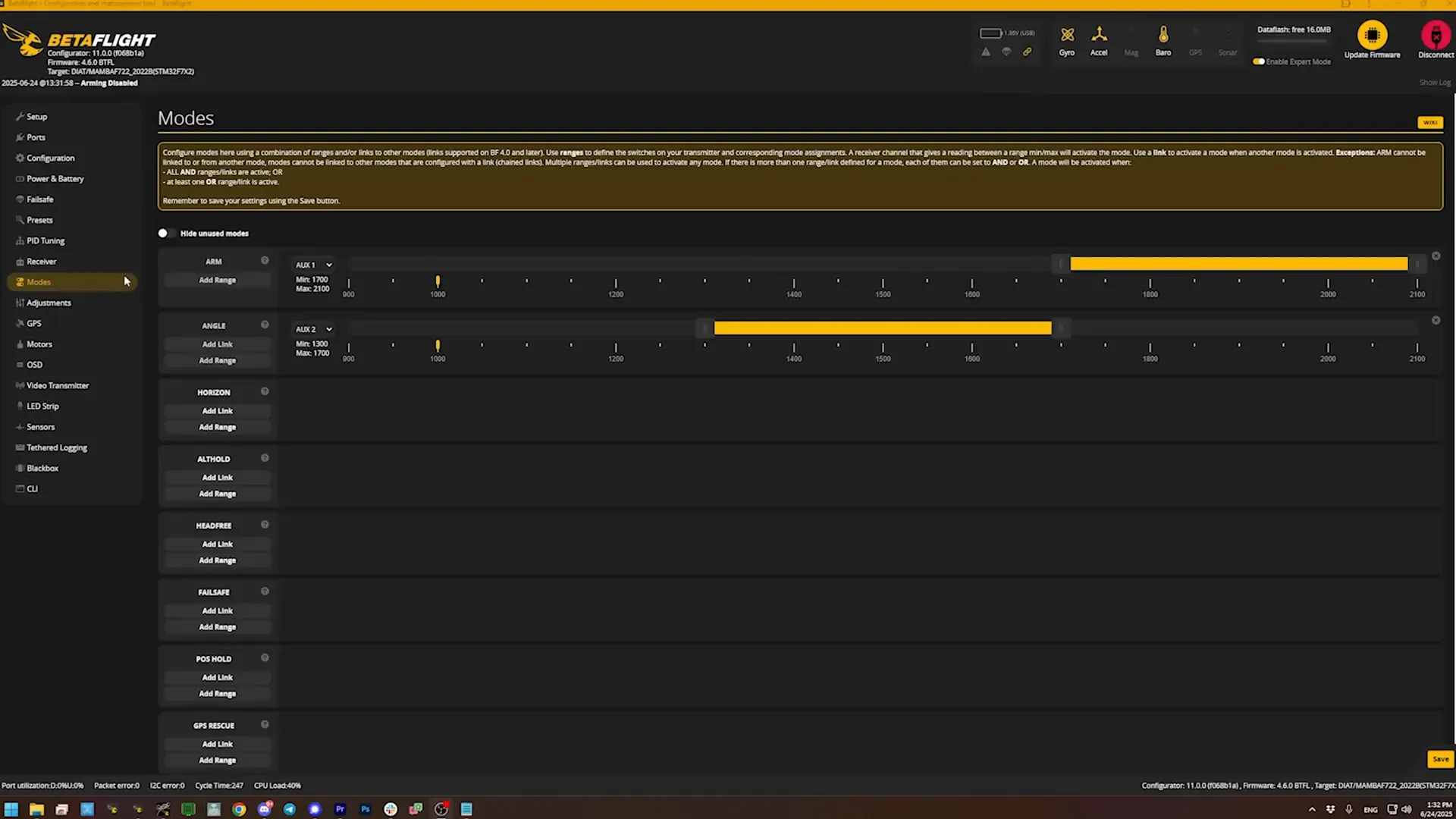
Next, assign altitude hold and position hold to your flight modes tab. Bardwell uses a 3-position switch: bottom position disables both, middle enables altitude hold only, and top enables both altitude hold and position hold. Betaflight requires altitude hold to be active for position hold to work properly.
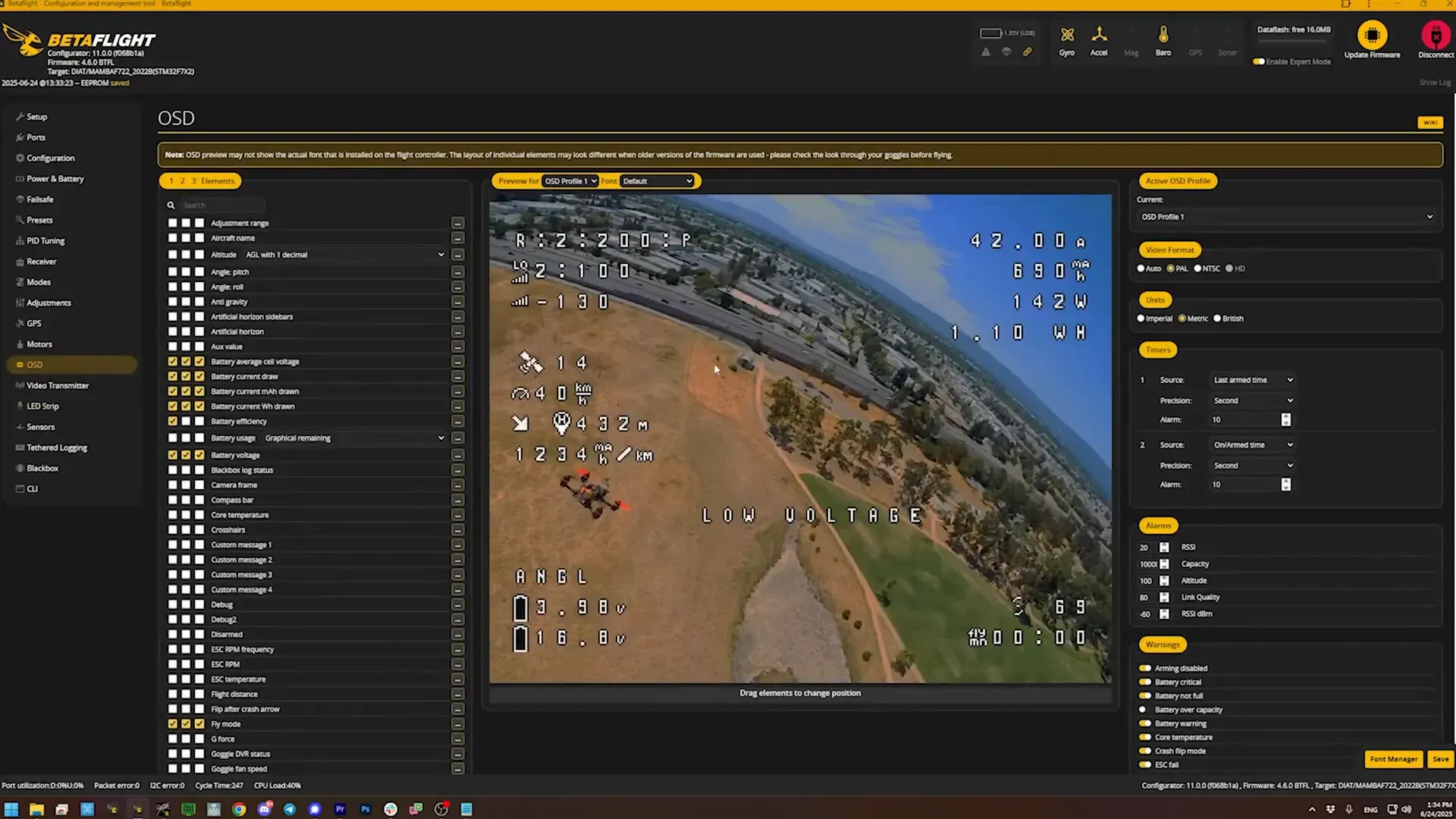
GPS is mandatory here. A barometer helps but isn’t essential. If you need help setting up GPS in Betaflight, Bardwell’s older Betaflight 4.5 GPS Rescue guide covers that well. You’ll also want to display satellite count, direction home, and distance home on your OSD to confirm your GPS is locked and working.
CLI Tweaks and Calibrations Before Takeoff
The Betaflight Wiki setup guide is your friend. Make sure altitude hold and position hold are included in your firmware build and your GPS works before enabling the features.
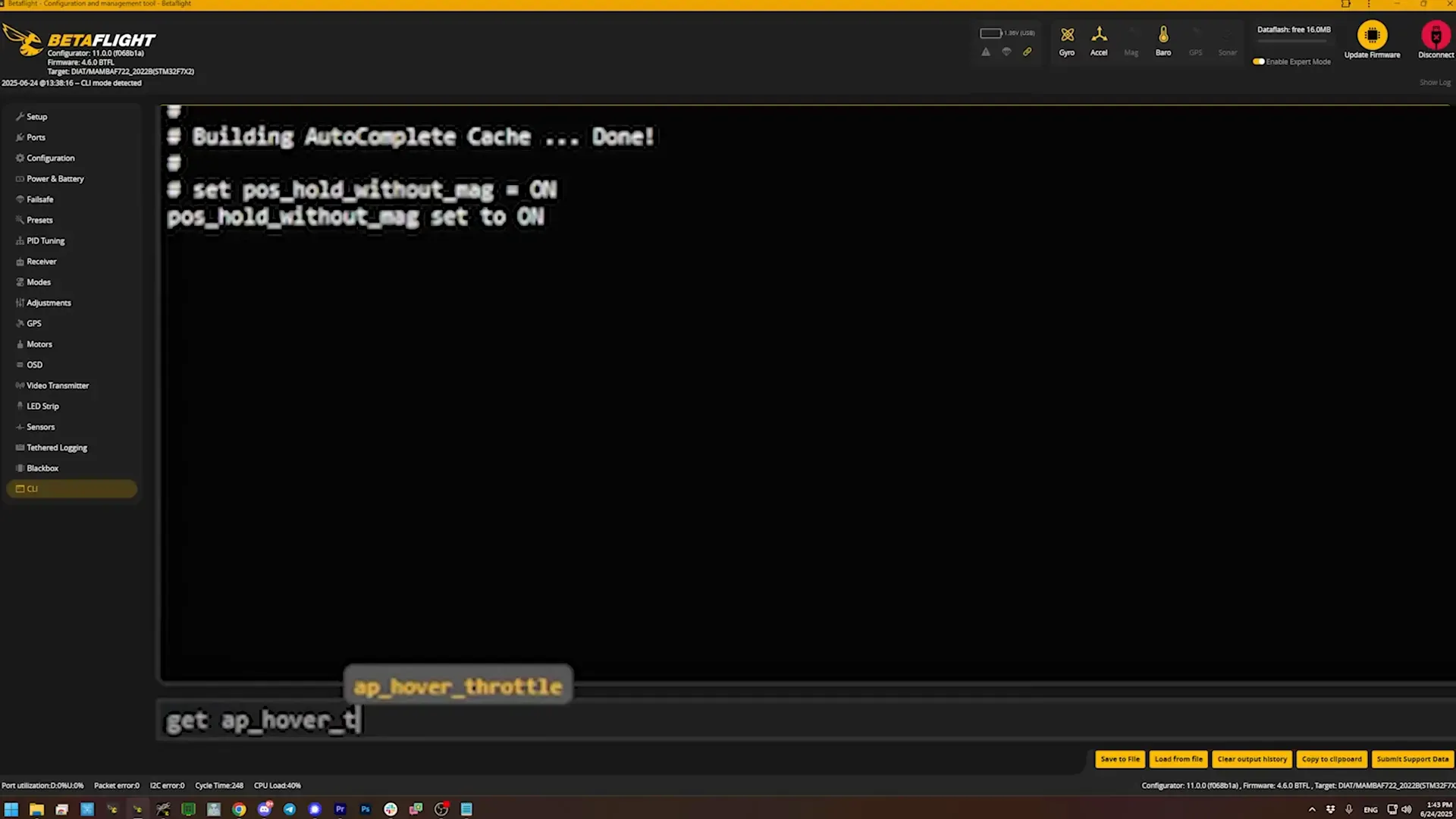
If you’re flying without a magnetometer, enable the CLI option set poshold_without_mag = on. This tells Betaflight you’re OK with the compass-less assumptions.
Next, set your hover throttle value accurately. This is the throttle percentage your drone needs to hover level without climbing or descending. Betaflight uses this value to jump to a stable throttle when you engage altitude hold, preventing sudden altitude drops or climbs before its PID controller kicks in.
Bardwell found the hover throttle value had changed since the Wiki was written and settled on setting set ap_hover_throttle = 1200 (roughly 20% throttle on a 1000-2000 scale) to match his drone’s real hover throttle.
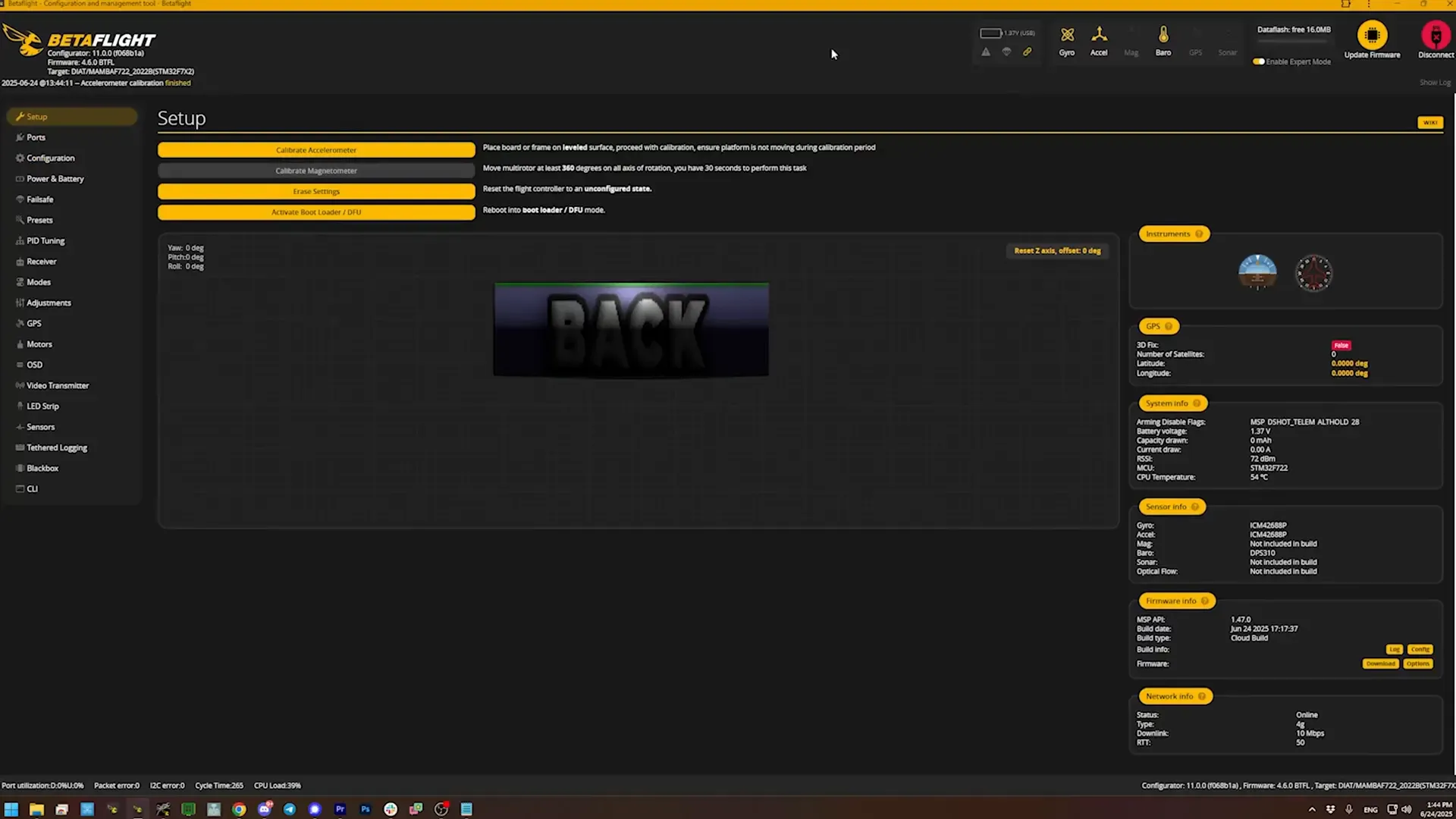
Finally, calibrate your accelerometer with the quad flat and level on the ground. This sensor helps keep the drone balanced, which is essential for position hold to work.
First Flight Tests: GPS Lock and Heading Calibration
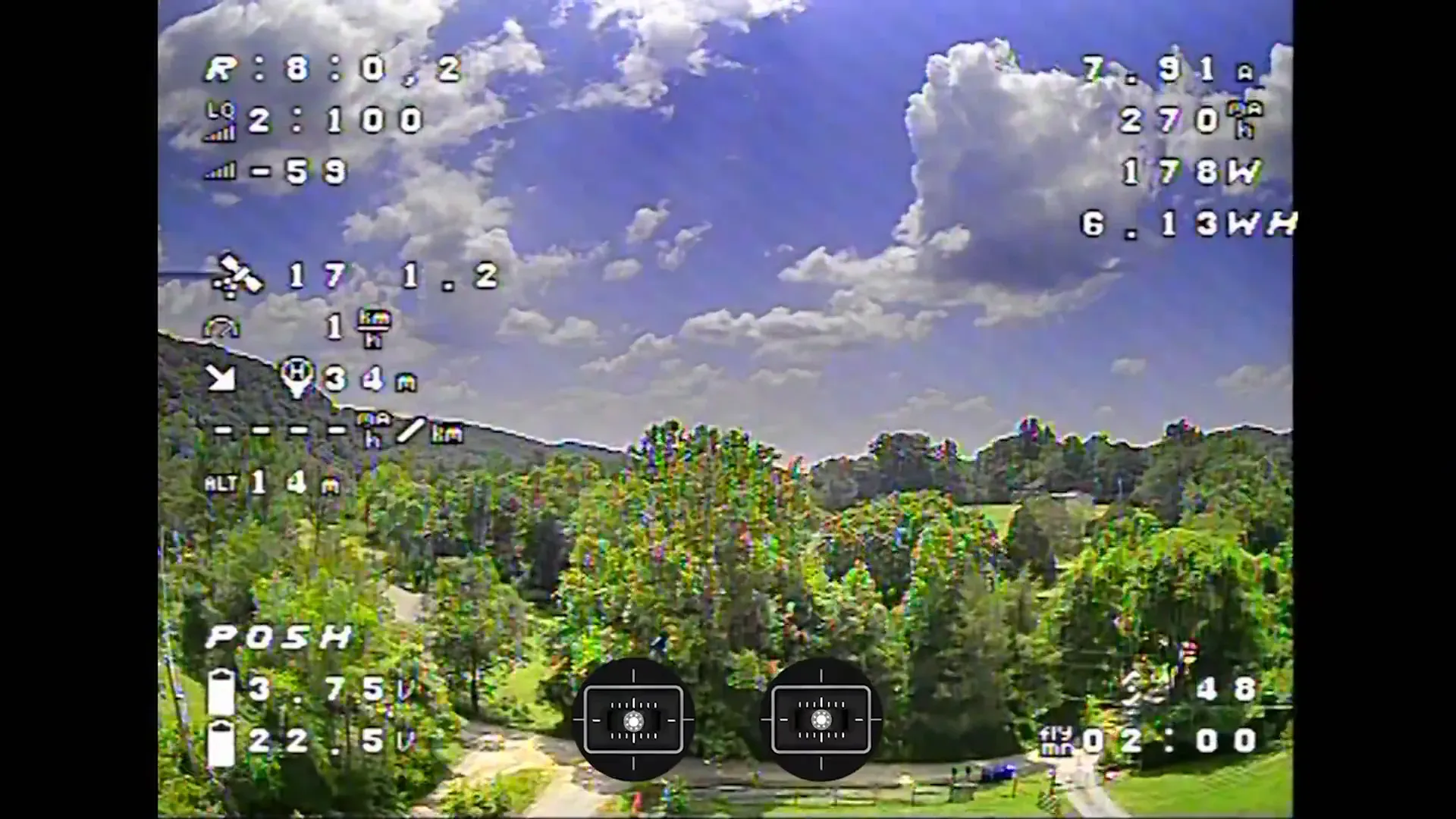
Before flipping the switch, confirm your GPS lock. Bardwell’s test drone locked onto 11 satellites, a solid fix. Altitude data on the OSD helps too, though he admits he forgot to enable it this time.
Then, test basic angle mode to confirm stable flight. The crucial step: fly in a straight line for a while to calibrate the GPS heading. Without this, the direction home arrow points the wrong way and position hold won’t work properly.
This heading calibration is a bit of a pain in the arse if you don’t have much flying space. Bardwell notes that flying straight longer than his field length might be necessary for perfect heading alignment.

Altitude Hold: The First Hiccups
Activating altitude hold the first time was a disaster. The drone started descending rapidly. The culprit? Bardwell had throttle expo on his transmitter, so the hover throttle value he set didn’t match the actual throttle output.
His OSD throttle read 36% while he’d set hover throttle assuming 20%. This mismatch caused altitude hold to think the drone was too high and throttle down.
After correcting the hover throttle value to match the real stick output, Bardwell tried again.

Altitude Hold: Success at Last
With hover throttle corrected and altitude visible on the OSD (around 291 meters ASL), altitude hold worked as expected. The drone maintains altitude when throttle stick is centred. Pushing the throttle up or down makes it climb or descend smoothly.
However, you still need to pilot the drone’s position manually. The right stick controls pitch and roll in angle mode, so altitude hold only stabilises altitude, not horizontal position.

Position Hold: The Moment of Truth
Engaging position hold was surprisingly impressive. The drone locked in position without drifting, holding its spot like a pro. You can still steer it manually with the right stick—deflecting the stick switches into angle mode for smooth control. Center the stick, and position hold snaps back on.
Bardwell notes some minor accelerometer drift causing slight roll when releasing the stick, but recalibrating the accelerometer should fix that.
Magnetometer: When You Need It and When You Don’t
Position hold without a magnetometer works well for most casual flying. But it’s not perfect. The gyro tracking Betaflight uses for orientation drifts over time, and position hold accuracy degrades if you loiter too long or fly sideways for extended periods, like orbiting a vehicle.
Flying straight periodically resets the heading estimate. If you want reliable, long-duration hover or complex manoeuvres, a magnetometer is worth the hassle. Bardwell typically skips magnetometers on smaller freestyle drones due to calibration headaches and interference.
Big, expensive drones or those doing intricate GPS-assisted flight may justify the extra complexity of a magnetometer setup.
Bonus: GPS Rescue and Return to Home
If your drone has GPS and can hold position, wouldn’t it be nice if it could also return home automatically? Betaflight 4.5 introduced GPS Rescue for just that. Bardwell’s GPS Rescue setup guide walks through the steps to configure this lifesaver. Most of it still applies to 4.6, even if the new version isn’t out yet.
Combining position hold, altitude hold, and GPS rescue brings Betaflight closer to autonomous flight modes without the bloat of full autopilot systems.
Conclusion: Betaflight 4.6 Brings Hover Mode to the Masses (With Caveats)
Betaflight 4.6’s position hold and altitude hold features are a milestone for FPV pilots craving stability without sacrificing control. The ability to run position hold without a magnetometer expands its usability to a wide range of drones.
That said, the system demands some patience and setup finesse. Calibrating heading by flying straight, adjusting hover throttle accurately, and understanding the limits of compass-less operation are essential to success. And, of course, don’t expect this beta release to be bug-free or foolproof.
For pilots willing to experiment, these new features open the door to safer flying, easier filming, and new tricks. For those who want to add GPS-based failsafes, Bardwell’s GPS Rescue setup guide remains a must-read.
For more on Betaflight, GPS, and FPV drone tech, check out our FPV drone blog collection and UK drone regulations guide.
FAQ
Do I need a magnetometer for Betaflight 4.6 position hold?
No. Betaflight can run position hold without a magnetometer by assuming the drone faces the direction it’s moving. However, a magnetometer improves accuracy, especially during sideways or loitering flight.
How do I flash Betaflight 4.6 if it’s not officially released?
Use Betaflight Configurator 11.0 or the web configurator. Enable expert mode and release candidates, then select the 4.6 dev build. Remember to manually enable position and altitude hold in the build options.
What is hover throttle and why is it important?
Hover throttle is the throttle percentage at which your drone hovers level without climbing or descending. Setting it correctly ensures smooth altitude hold activation without sudden altitude changes.
Why does the drone need to fly straight before position hold works?
Flying straight calibrates the GPS heading, letting Betaflight know the drone’s orientation. Without this, position hold can’t correctly interpret drift direction.
Can I use these features on drones without GPS?
No. GPS is mandatory for position hold. Altitude hold can work using barometer data, but position hold relies on GPS coordinates to maintain horizontal position.
Takeaway Box
- Betaflight 4.6 adds position hold and altitude hold—finally letting drones hover like pros.
- Use Configurator 11.0 or the online version to flash the beta firmware and enable these features.
- Position hold works without a compass by assuming the drone faces its movement direction—good enough for most freestyle flying.
- Calibrate GPS heading by flying straight before engaging position hold, or risk your drone drifting like a lost shopping trolley.
- Set hover throttle accurately to avoid altitude hold mishaps; throttle expo on your transmitter can mess this up.
This article was based from the video Betaflight 4.6 POSHOLD / ALTHOLD setup guide




