

Cheap RTK alternatives matter when your Vtol drone must sit on a centimetre-sized mark, not a garden shed.
TL:DR
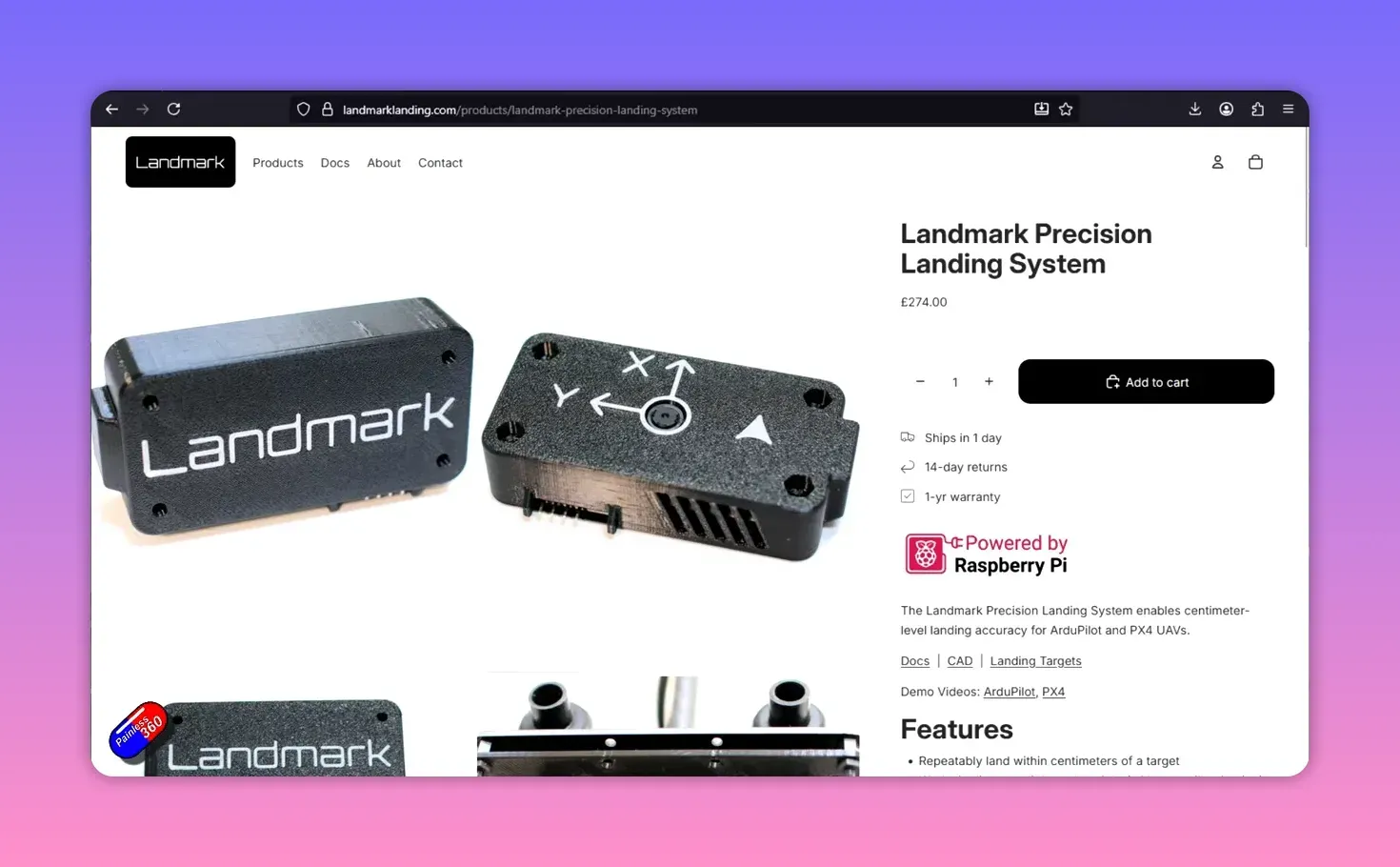
The Landmark Precision Landing System uses a Raspberry Pi and camera to send MAVLink landing-target data to ArduPilot. It pins your Vtol drone to a printed AprilTag pad for centimetre-class returns, costs far less than IRLock or pro RTK kits, and needs a spare UART, decent light, and correctly sized targets.
Why bother?
Standard GPS return-to-home stops you within about a metre to 1.5 metres of the arming point. That is fine for most flights—but rubbish for payload drops or tight recovery zones.

RTK solves accuracy but adds cost and setup complexity. Landmark offers a simpler, cheaper fix for Vtol drone ops that demand repeatable precision.

What is the Landmark system?
It’s a compact unit housing a Raspberry Pi and camera, paired with a printable landing target. The Pi does vision processing and streams MAVLink landing-target messages to your flight controller.
The flight controller reads those messages and uses them during loiter or Return-to-Home to zero the craft onto the target. The result: consistent, centimetre-level landings.
How you fit it
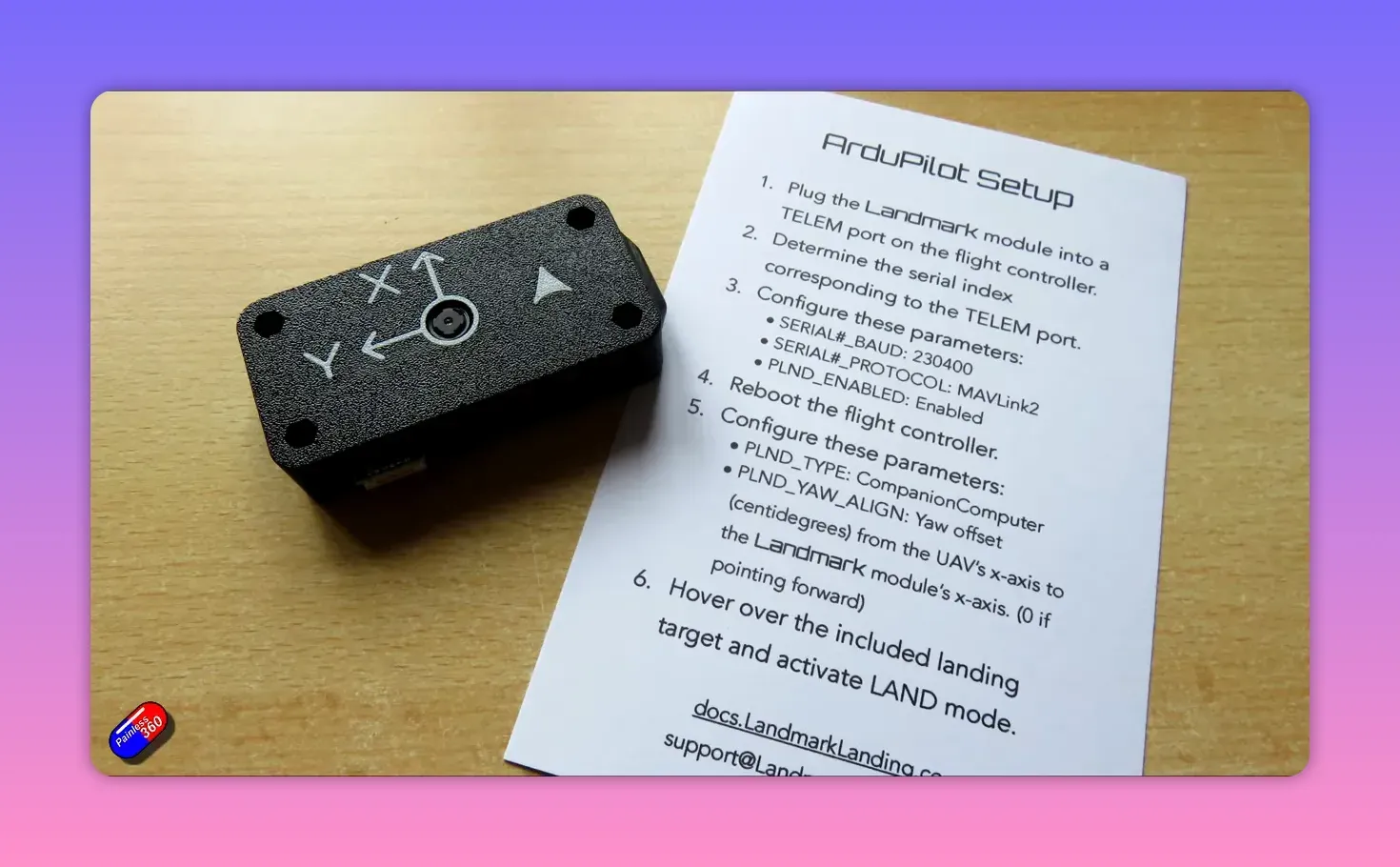
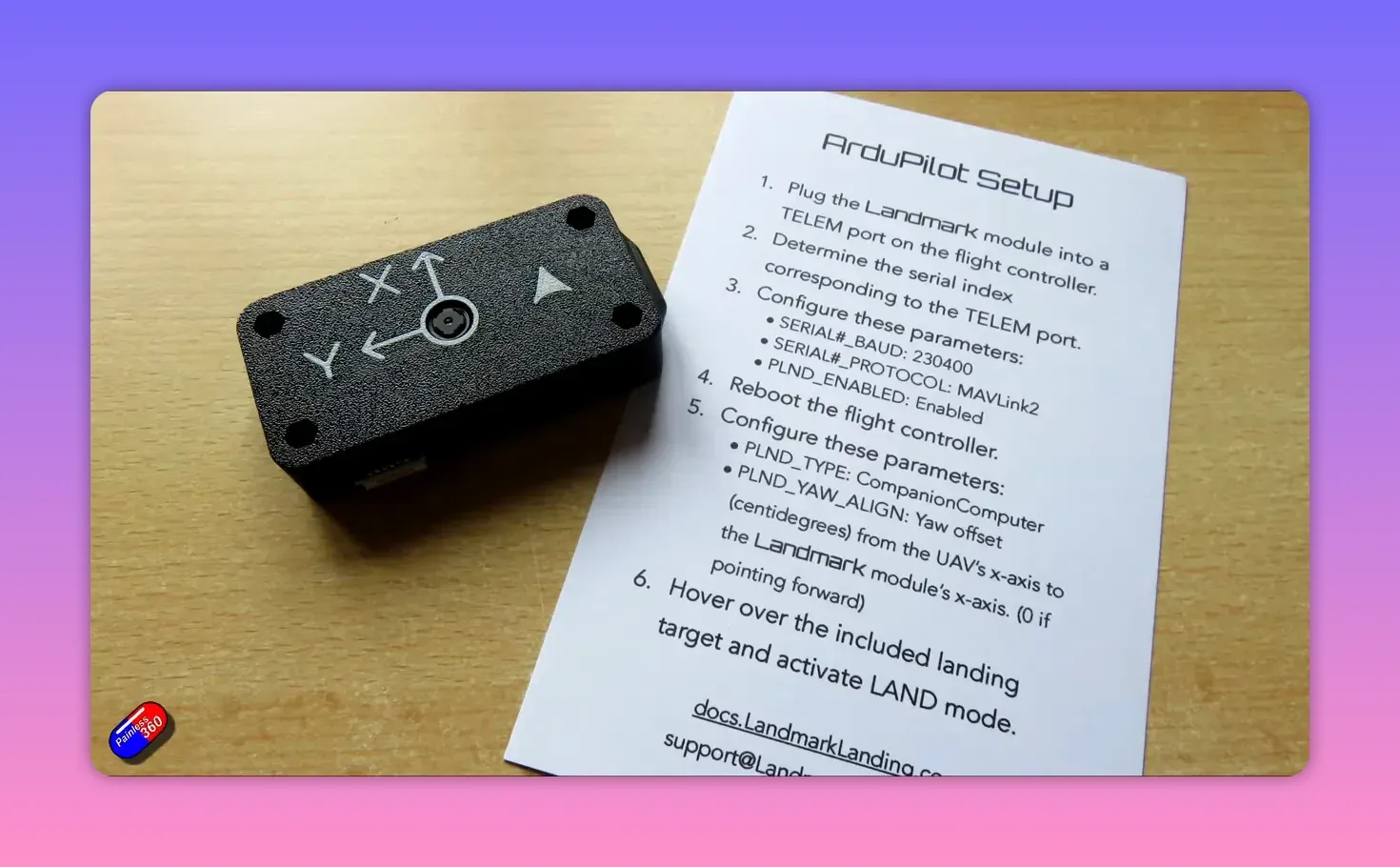
Mount the unit facing down. Align X-forward if possible; you can rotate in software if not. Hook it to a spare UART/telemetry port and power it from the FC or a separate rail.
In ArduPilot set the serial speed to 23400, protocol to MAVLink2, enable PLND, and select precision landing type “companion computer”. If mounted rotated, use the yaw alignment setting.
Landing targets and AprilTags
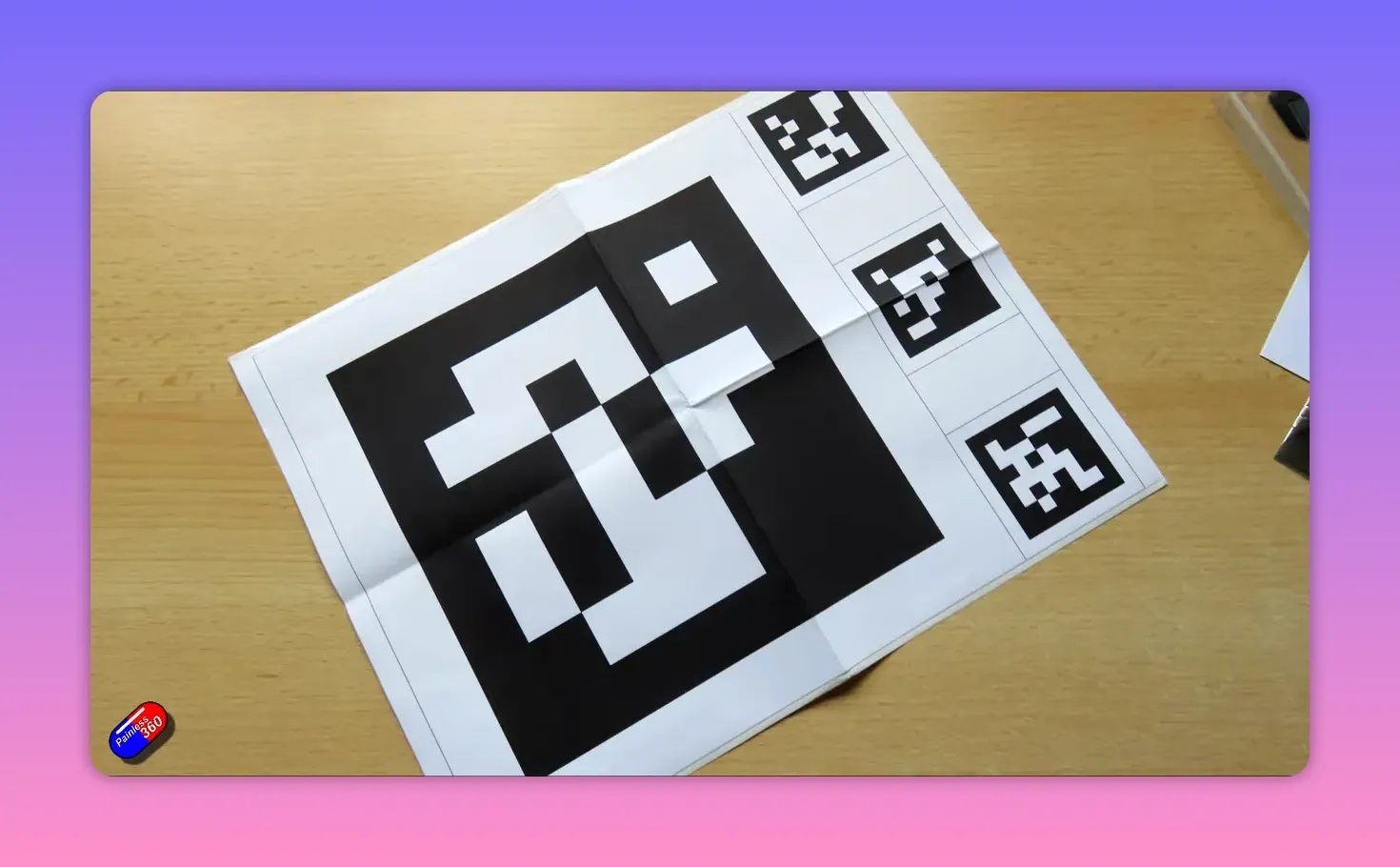
The kit uses AprilTag markers—not QR codes—one large tag plus three smaller tags for redundancy and robustness. The software localises using up to four tags, but will work with just one visible.

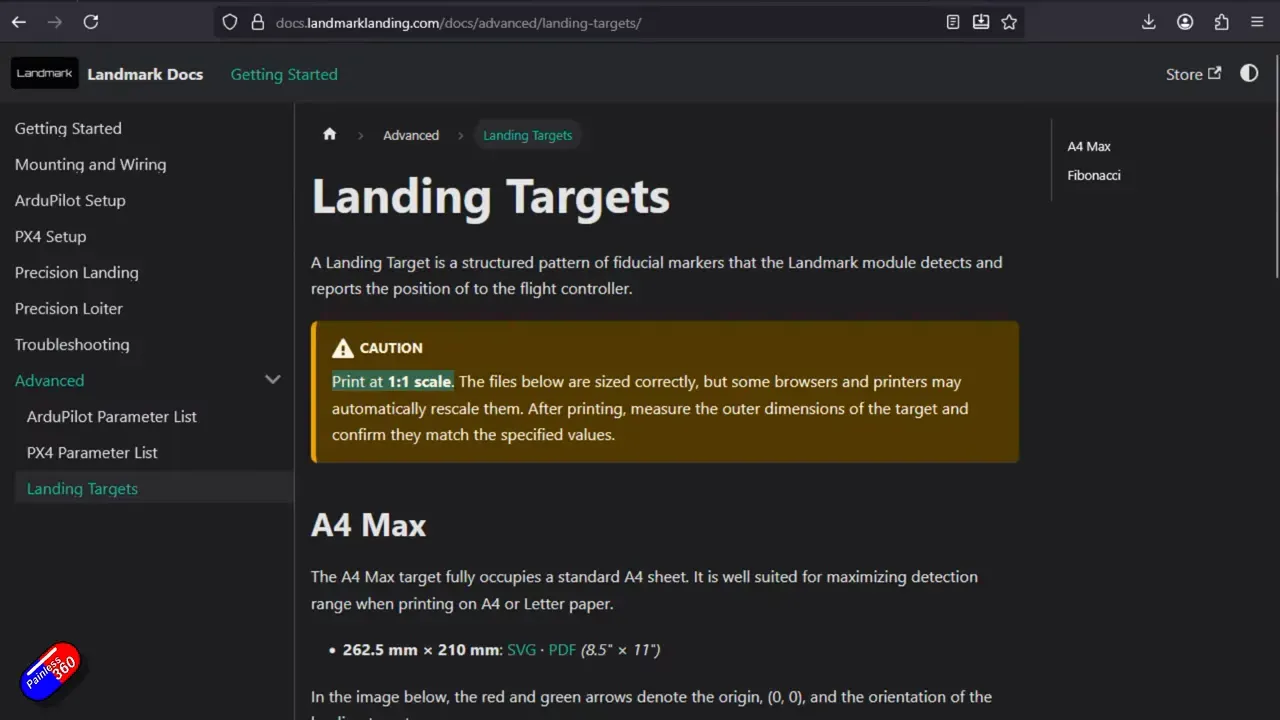
Print targets at the exact sizes provided. Scale errors kill accuracy. Download templates from the vendor and follow the sizing notes.
Practical caveats
Power: expect about 0.5 A draw. Make sure your flight controller or BEC can supply that, or power the unit separately.

Light: the camera needs decent illumination of the pad. Night ops need auxiliary lighting or rethink the plan.

Software: set PRECISION_LAND_STRICT to zero if you want normal landing fallback when the pad is not visible. You can also disable precision landing entirely when needed.

Cost vs alternatives
Compared with IRLock units or a full RTK stack, Landmark undercuts prices while giving real precision for many missions. It is not a miracle—it's a cheap, pragmatic tool.

When to use it
Use it on Vtol drone sorties where payload drop, safe recovery, or tight landing zones matter more than absolute independence from visual aids.

FAQ
Will this work with ArduPilot on my copter or VTOL?
Yes. ArduPilot supports MAVLink landing-target messages and has a PLND module. Configure the UART, protocol, and precision-landing parameters as documented.
How accurate is the system?
Accuracy is centimetre-level when the target is visible and printed to spec. Performance depends on camera height, lens, light, and tag size.

Do I need all four AprilTags visible?
No. The system can localise with a single tag. The extra tags add robustness and better pose estimation when visible.
What are the wiring and power requirements?
You need a spare UART and about 0.5 A at the unit voltage. If your flight controller can't spare that, power the unit from a separate BEC.

Final notes
I’ll fit this to my 500-class quad and report back after field tests. For now, Landmark looks like a solid, pragmatic way to get precise landings without breaking the bank or your free time.

Takeaways:Landmark adds vision-based precision to Vtol drone returns, using a Pi and AprilTags.Requires UART, ~0.5A power, and correctly sized targets to work well.Cheaper than IRLock or full RTK; trade-offs exist but payoff suits many practical missions.
This article was based from the video Land your quad/VTOL on an exact spot every time: The Landmark Precision Landing System

