Right now many agree that the Omnibus F4 series is one of the best F4 flight controllers you can buy for the money. There where a few issues with the first few versions, but since V4, they now work flawlessly and this is the flight controller I recommencement to everyone. Unless you are a seasoned veteran of FPV racing scene, using an omnibus can be daunting as there is not much documentation. This guide will try to clarify everything.
This article is currently written for the omnibus F4 V5 flight controller, but a lot of the information is still applicable to some of the older boards, but don’t waste your time buying any of the older (or clone) boards as anything before V4 has some hardware issues that will ultimately result in the board breaking.

Looking for the Omnibus F4 V6 Guide? Read it here
What is in the guide
- Omnibus Pinout Diagram
- Powering your Omnibus
- Connecting your receiver
- Omnibus Solder Jumpers (Selecting ESC Telemetry, Current Sensor, Power source)
- Connecting your FPV gear
Omnibus F4 V5 Pinout


Powering your Omnibus F4
The omnibus F4 V5 can be powered directly from your flight battery (2s-6s) since the built-in regulator will convert the voltage down to 5V. However, if you prefer you can also power it via a cleaner direct 5V power supply. This is helpful if you have particularly noisy motors that cause a lot of interference on the circuit.
Powering directly from battery
The most common method to power the omnibus is direct via the battery supply. The board (version 5) can handle up to 6S Lipo voltage directly on the Vbat pin on J5 as shown below.

Here we have used a PDB, as most of us will be using this FC on a quadcopter.
Don’t get confused with the Vbat (video battery) pin on J3, as if you connect your battery voltage to this you can fry your board or FPV gear. See RAM Power section below.
Powering from typhoon 4in1 ESC
If you are using the Typhoon 4in1 ESC you can directly connect this to the JST-JH connector (J10) as shown below. The only thing you should take note of is the solder jumper to choose between the current sensor or ESC telemetry. More on the solder jumpers later in this guide.
Powering from 4in1 ESC using current sensor
This configuration lets you use the built-in current sensor on the typhoon 4in1 ESC (or any other 4in1 ESC that has a current sensor).

Powering from 4in1 ESC using ESC Telemetry
The typhoon 4in1 ESC supports ESC telemetry (BLheli32), so if you want to use this you need to change the solder jumper

Connecting your receiver
Connecting your receiver to the omnibus is not much different from any other flight controller. You connect your serial receivers (SBUS, IBUS) and PPM receivers to the pin on J7 which corresponds to UART6. To connect a Spektrum receiver this connects to the dedicated Spektrum satellite connector on J8 (corresponds to UART1)

See below on how to enable smart port telemetry using soft serial

With the latest version of the omnibus, the software will automatically change the SBUS/PPM pin depending on what receiver type you select within betaflight. You don’t need to remove any resistors or change any solder jumpers (like you did on the older versions of the omnibus).
Inverted and non-inverted SBUS

- SBUS/PPM (J7) header (uart6) This is for inverted signal receivers; has fixed inverter that cannot be turned off (by CLI command sbus_inverter=on/off)
- RX1 (on J2) (uart1), These are for non-inverted signal receivers.
Using FRsky smart port telemetry via softserial
Smart port telemetry as shown in the connection diagram (green wire) will let you send telemetry data back to your Taranis radio. However, the problem on the omnibus is that the UART1 ports do not have a serial inverter built in. To overcome this you simply need to use soft serial which emulates the inverter via software.
- Assuming you are connecting it as per the diagram above, we will need to enable softserial on TX1. The first thing we need to do is to find what pin the TX1 is connected to so we can enable softserial on that pin.
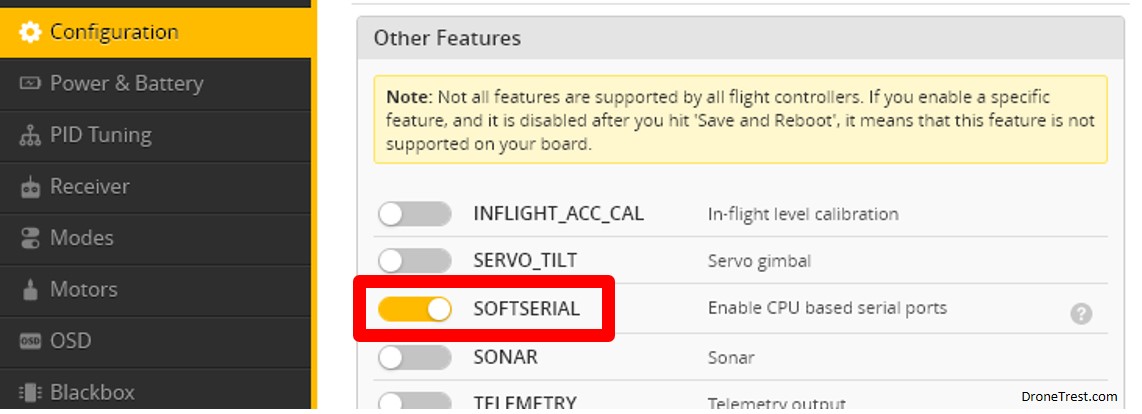
- The first thing to do is to enable the softserial feature on the configuration tab
- Now we need to tell the flight controller what pins we want to use for softserial
- In the CLI and type the
resourceto get a list of pins, look for TX1

- In this example, TX1 is assigned to A09. This is the case for most flight controllers, but sometimes it can be different.
- Now we will enable softserial 1 on pin A09. In the CLI type the following command:
resource SERIAL_TX 11 A09
save
Port 11 is for softserial 1, and port 12 is for softserial 2. So if you wanted to assign softserial 2 to another pin (such as UART6, or the LED pin), you could assign port 12 to the corresponding pin you got from the
resourcecommand. If you wanted to assign A09 to softserial 2, you would use the commandresource SERIAL_TX 12 A09
- Now when you go back to the ports tab in betaflight (after your FC reboots), you will now see a new line called SOFTSERIAL 1

- Simply enable SmartPort telemetry on this port and you should now have Frsky telemetry working on your receiver.
- If you cant get it working, you may need to try using the CLI again to turn inversion on and off using the following commands.
set tlm_halfduplex = on
set tlm_inverted = off
save
- If off does not work, try agin with
tlm_inverted = on.
Spektrum DSM
All of the omnibus boards have a dedicated Spektrumconnector which has the signal, 3v supply and ground as needed for your Spektrum satellite receiver.
DSM connector (on J8). This is for non-inverted signal receivers and is equivalent to RX1.
Omnibus Solder Jumpers (J16 and J20)
The omnibus has some solder jumpers, the jumpers on J16 and J20 allow you to select between the current sensor, or ESC telemetry or to output 5V on the servo rail.

Power source Selection Jumper J20
J20 allows you to enable 5V output or ESC telemetry on the servo rail. This is ideal if you are flying a fixed-wing plane and want to power your servos from the omnibus. If you are flying a quadcopter using BLheli32 ESC, then you will want to enable telemetry on the servo rail.

ESC Telemetry Selection Jumper J16
J16 is used when you have a 4in1 ESC connected to your omnibus. This solder jumper lets you select between ESC telemetry or current sensor input to the omnibus for a 4in1 ESC.

Connecting your FPV Gear
The most important thing to consider when connecting your FPV gear to the omnibus is that the video line from the FPV camera goes to the Vin, and Vout form the omnibus goes to the VTX.
An example of how to connect your FPV gear is shown in the diagram below. If you are using a PDB with a regulator (or LC filter) built in. Then it is best to power your FPV gear directly from there to ensure it has the cleanest power supply.

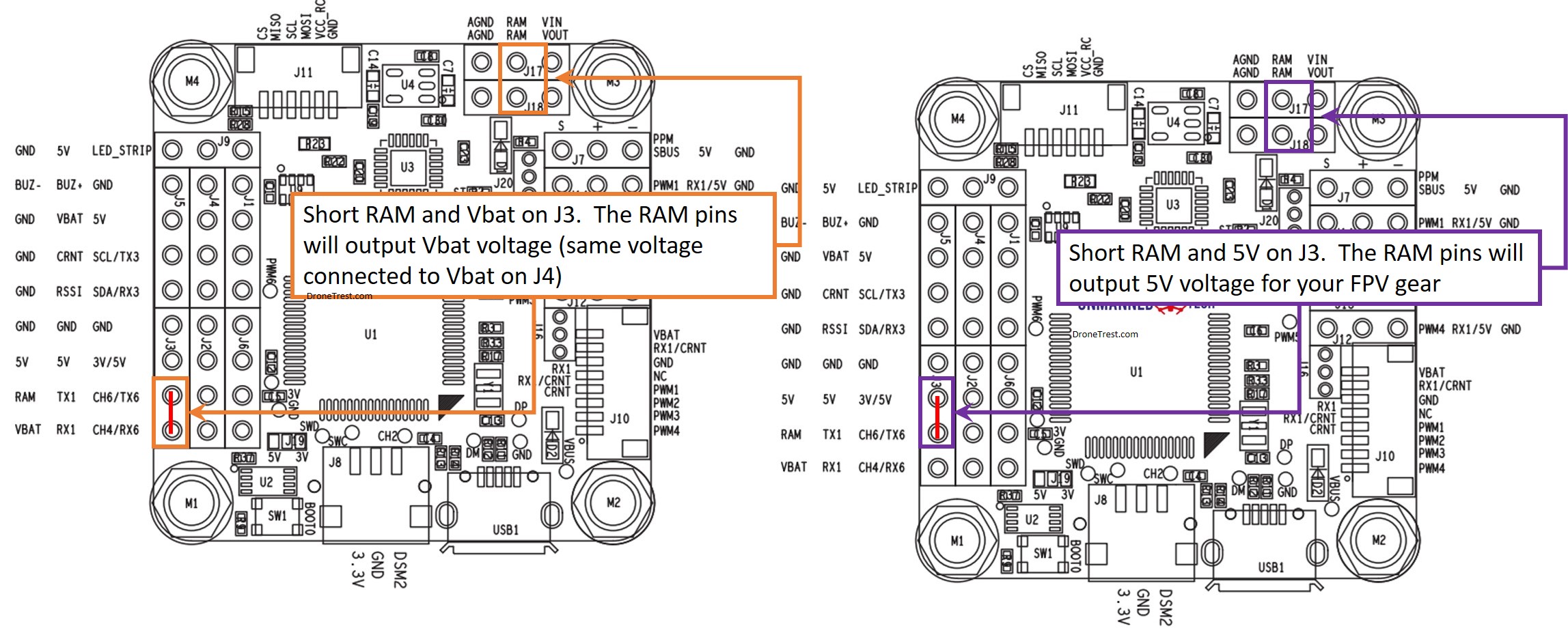
RAM solder jumper J4
This solder jumper allows you to choose what voltage to supply to your FPV gear on the RAM pins. These are used if you are powering your FPV gear directly from your omnibus (or if you don’t have a PDB with a regulator).
Using Smart Audio / BFCMS / Tramp VTX
Since the omnibus has a built-in betaflight OSD, then it makes sense to use a VTX that supports telemetry. This lets you easily change the channel or power level directly via your R/C controller.
The VTX will simply connect to the spare UART1 TX port and you need to enable the appropriate telemetry protocol on the ports tab within betaflight. For more information check out our VTX telemetry guide.
Any questions?
I have not covered everything in this guide, so if something is not clear, or you want me to explain anything specific (like connecting an RGB LED) just ask and I can get that added.
Thanks for reading, if this guide helped you please share it with your friends or consider buying something from the links on our blog as we get a small commision to help fund this site!