
Why this matters: PX4 runs serious drones and commercial projects. Get the setup right and you avoid soldering mistakes, dodgy compass readings and an expensive lawn ornament.
TL:DR — Install QGroundControl, wire your board to the expected UARTs, flash the latest PX4, calibrate sensors, set radio and failsafes, configure motors and motor geometry, then test hover with a kill switch armed.
What you need before you start
Download QGroundControl from qgroundcontrol.com for Windows, macOS, Linux or Android. It talks to PX4 and presents every setup panel you will use.
Buy sensible, cheap hardware if you like saving money. The Miko Air 743 V2 works with PX4, BetaFlight, iNav and ArduPilot. A 4-in-1 55A ESC bundle keeps the build compact and affordable.

Wiring and UARTs: follow the diagram
PX4 expects devices on particular UARTs. Reassigning UARTs is possible but fiddly. Save time — wire to the expected ports and avoid pointless troubleshooting.
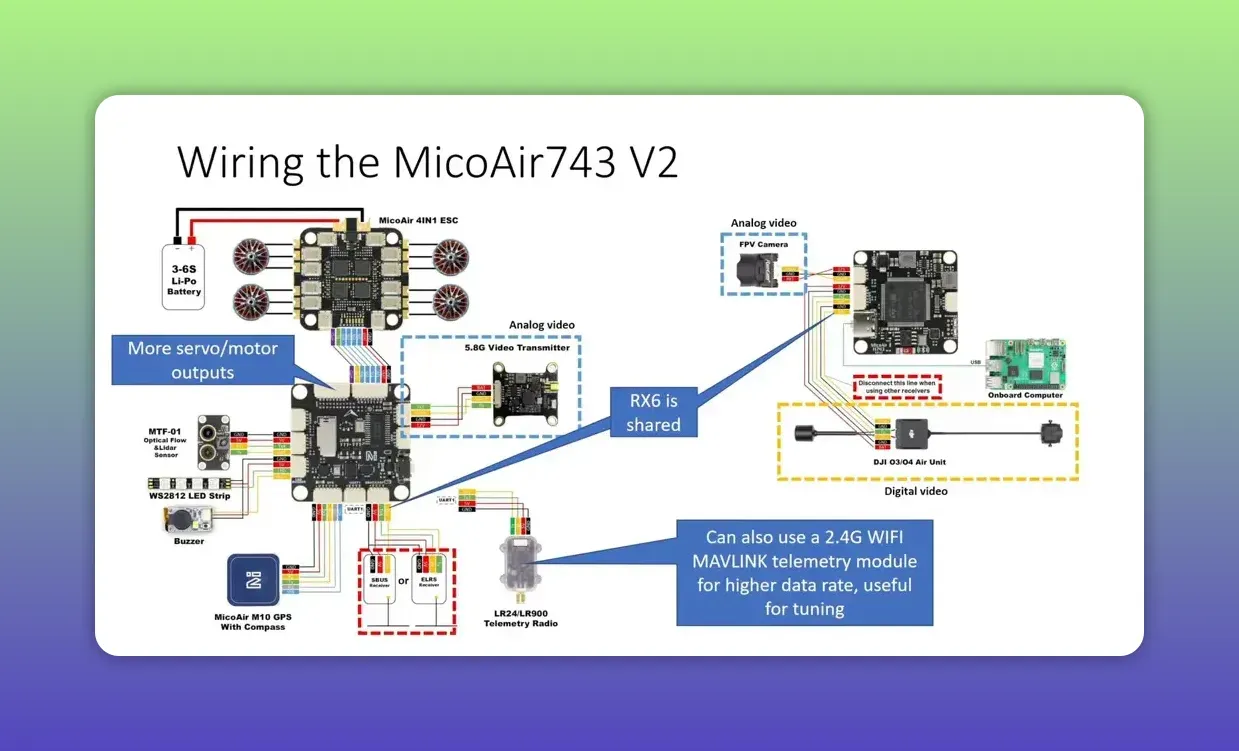
Watch for shared pins. On the Miko Air 743, the digital video plug shares RX6 with the receiver. If you fit a DJI O3 unit, remove its SBUS line or your RC receiver will never talk.
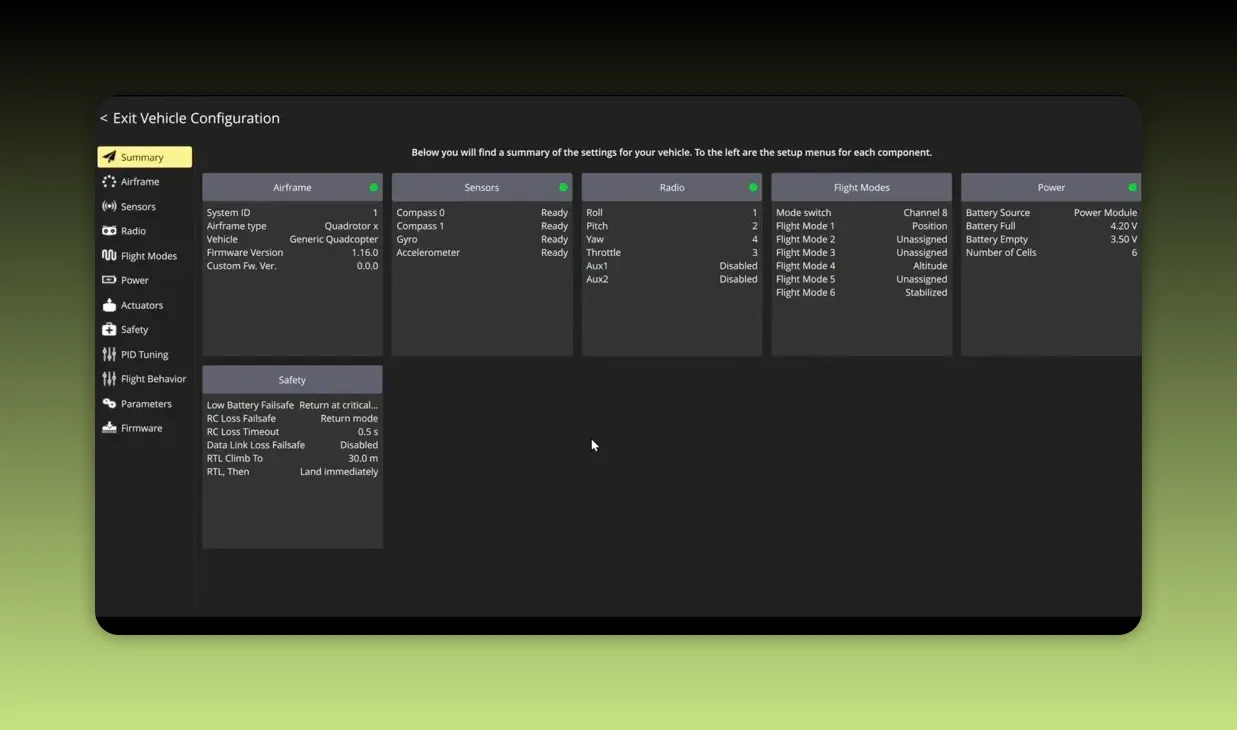
First steps in QGroundControl
Plug the board into USB and open QGroundControl. Click the Q, then Vehicle Configuration. Check firmware and flash the latest PX4 if needed. Reboot the board after a flash.
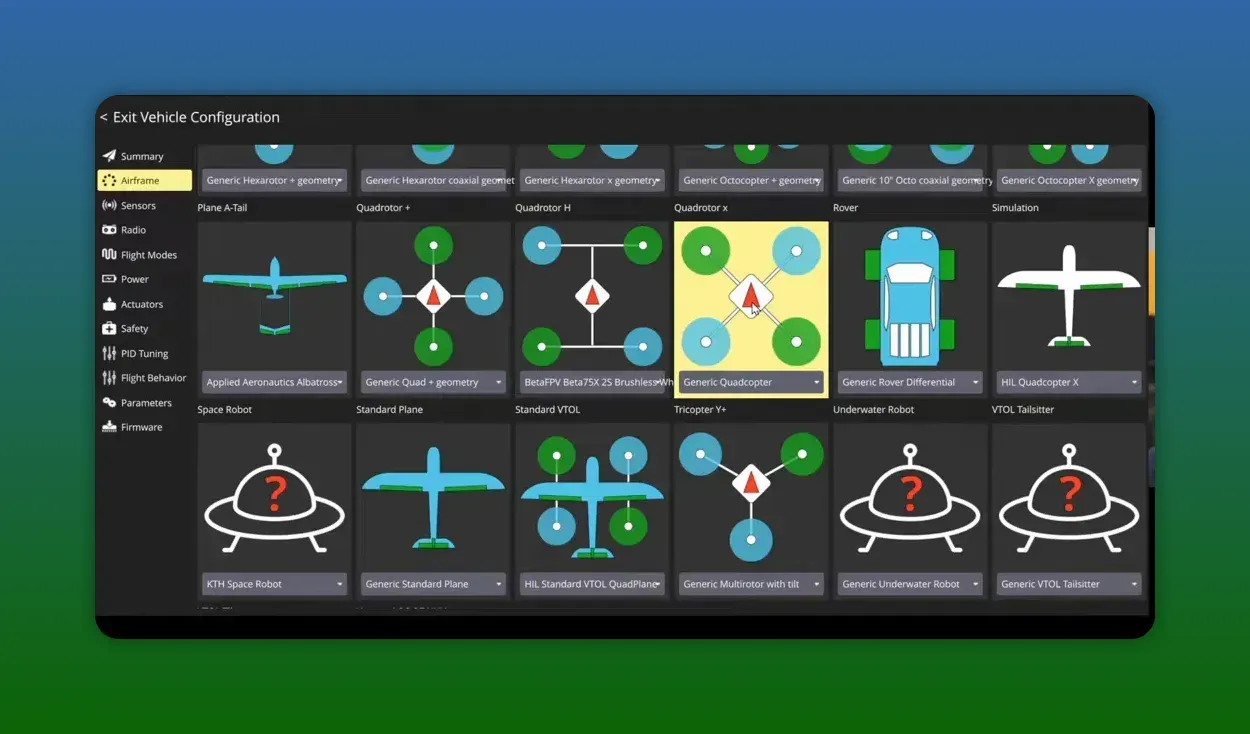
Pick the correct airframe
PX4 offers airframes from airships to quadplanes. Pick the configuration that matches your craft. Use Generic Quad for a standard X or + quad.
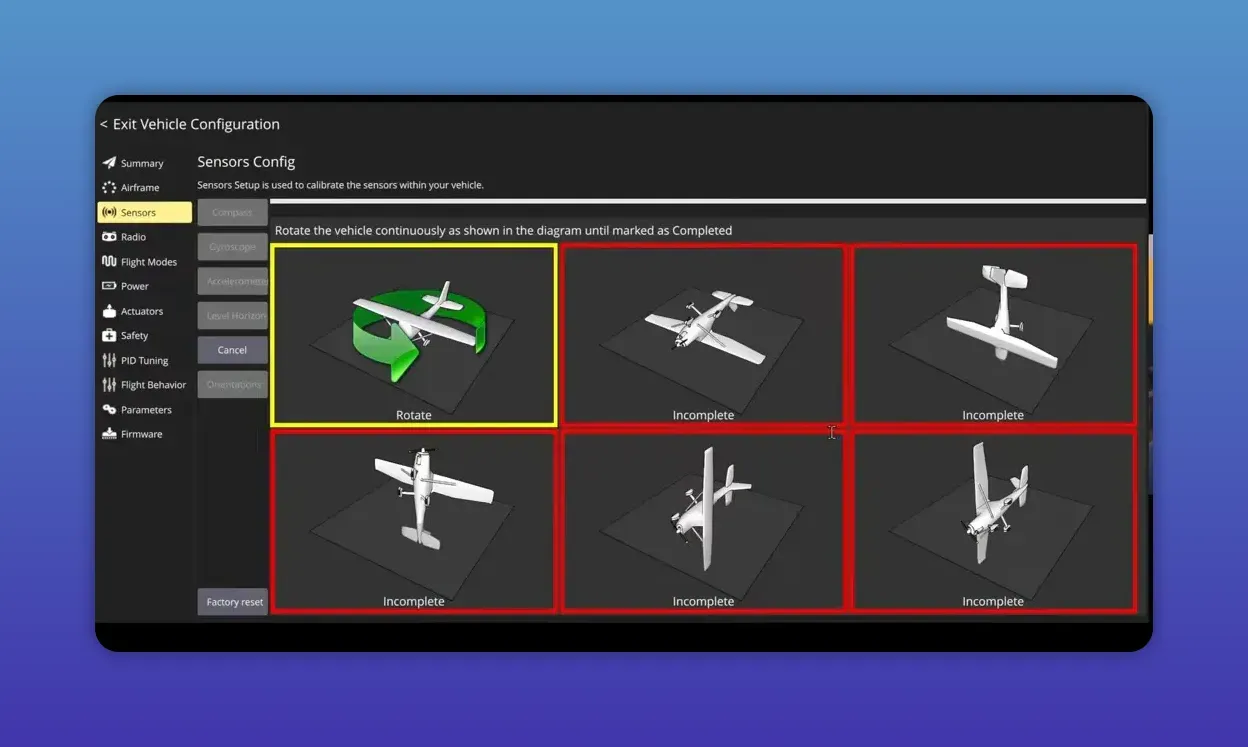
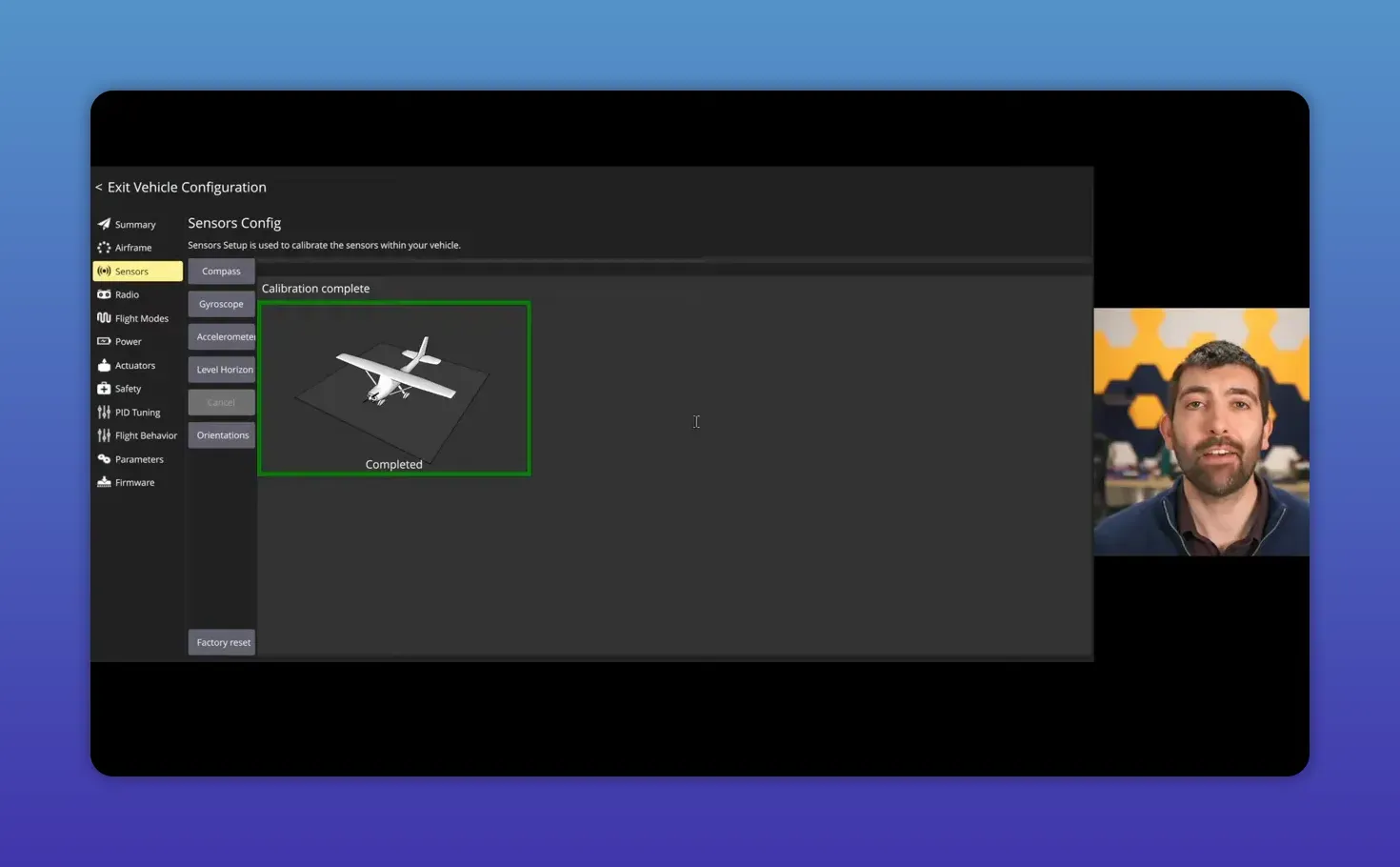
Sensors and the compass dance
Calibrate compass outdoors, away from metal. Scan magnetic field strength with any compass app. Remove metal jewellery. Set the board orientation in QGC before starting.

The compass routine makes you rotate the drone flat, inverted, nose-down, nose-up, right and left sides. Reboot the vehicle when finished.
Gyros, horizon and accelerometers
Calibrate gyros on a level, vibration-free surface. Set the level horizon while the drone sits flat. Accelerometer calibration wants the craft level on six faces — not always possible on every frame.
Most accelerometers ship fine from factory. If you can, do the six-face routine. The AOS UL8 makes that easier due to its frame shape.

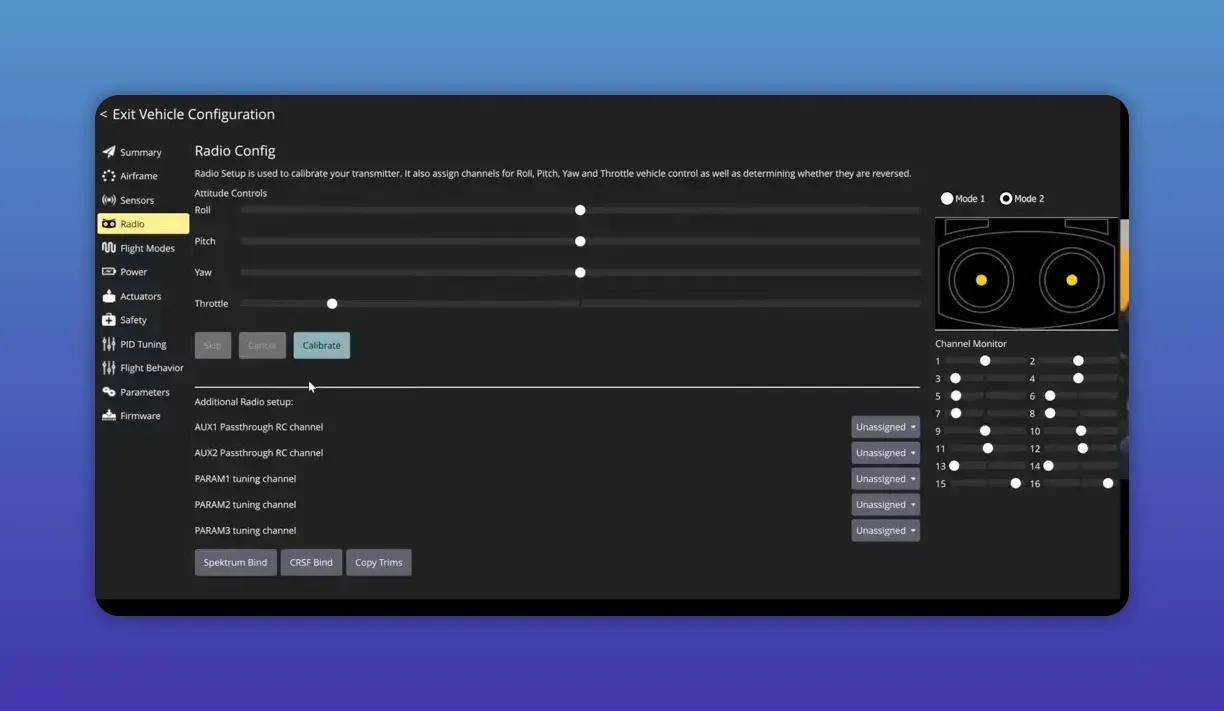
Radio setup and calibration
Tell PX4 which RC input driver to use via Parameters → serial. Pick Crossfire, SBUS, DSM, or the protocol your receiver uses. Set the UART that the receiver is on and disable other input drivers to avoid collisions.
Power the transmitter before powering the drone. PX4 prefers seeing stick positions at boot. Then calibrate sticks and switches in QGC and write the parameters to the board.
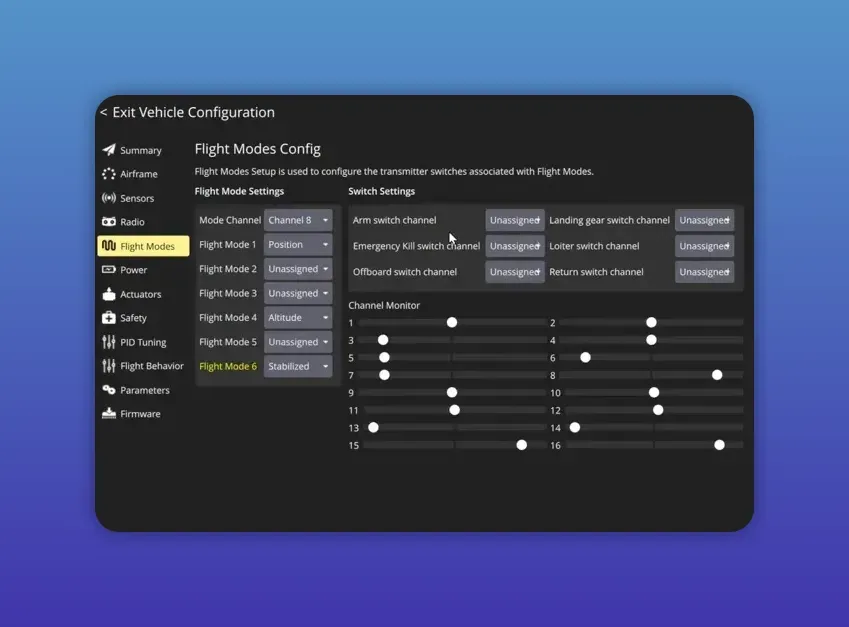
Flight modes and safety switches
Use a three-position switch for tuning: Position (GPS) for final tuning, Altitude for throttle tuning, Stabilized for rate/PID tuning. Keep it simple — fewer modes, fewer surprises.
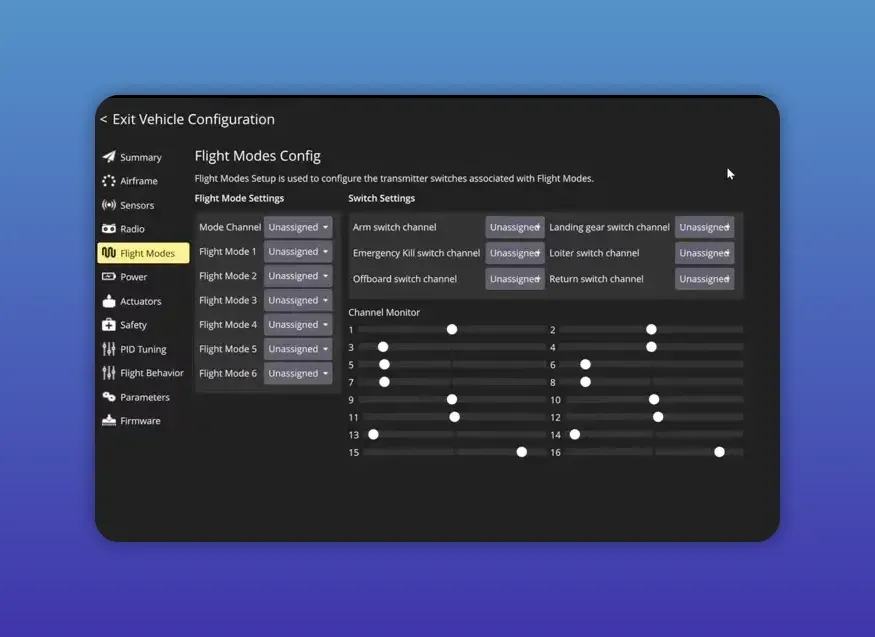
Set an arm switch and a kill switch. I use Channel 6 to arm and Channel 5 as the emergency kill. If tuning turns south, flick kill and let the drone drop into long grass — unpleasant, but less embarrassing than a runaway.
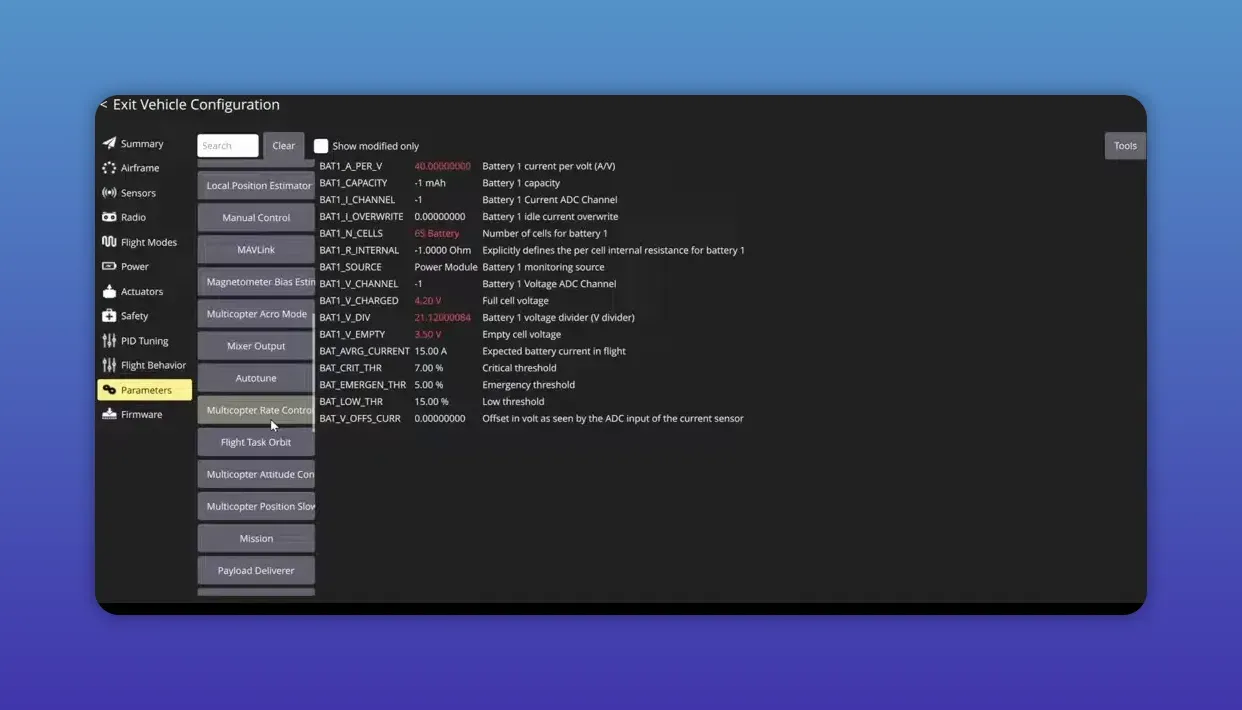
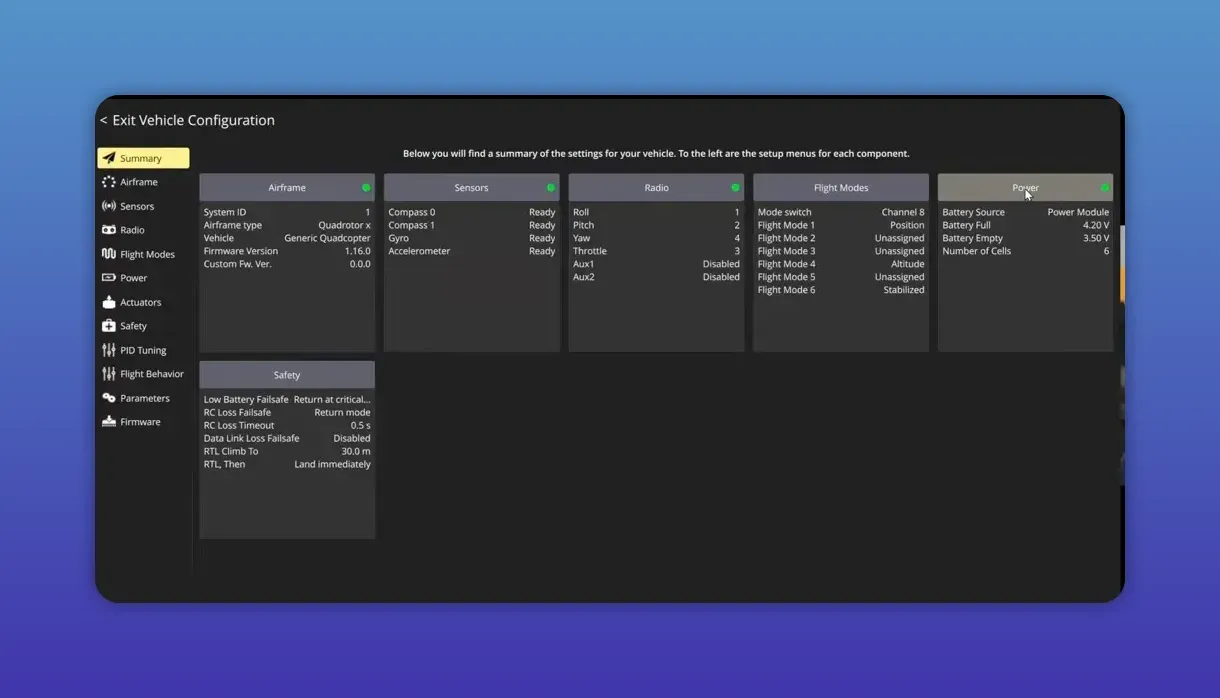
Power settings and battery chemistry
Set battery cell count and voltages in the Power panel. Use 4.2V full for LiPo cells and set empty near 3.5V. Lithium-ion cells vary — check your pack spec before configuring minima and maxima.
Calibrate volts-per-amp if you have a shunt on your ESC. For example, a 25 milliohm shunt gives ~40 amps per volt. Use the calculate button if you have a reliable meter.
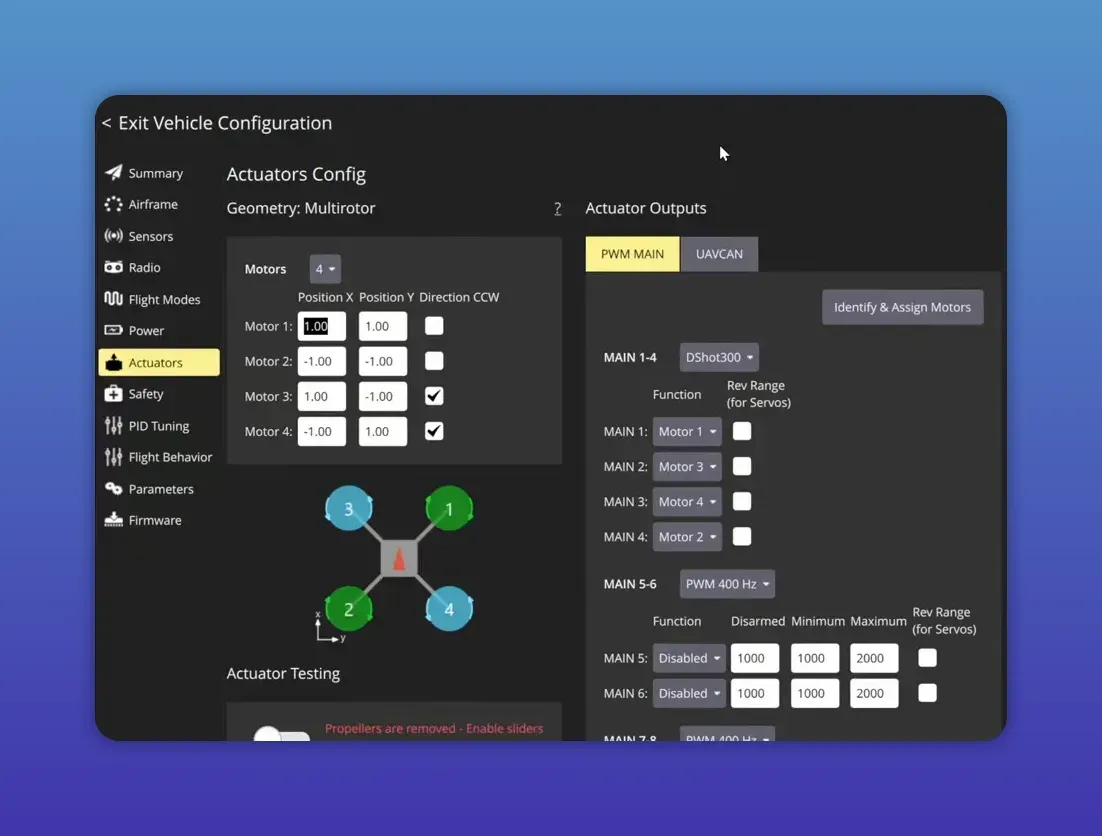
Actuators, ESC protocol and motor setup
Set ESC protocol to DShot 300 for most PX4 setups. DShot 600 gives no advantage for PX4 and raises noise risks. Configure DShot for motors 1–4 and check higher motor counts if you run hexes or octos.

Run the Identify and Assign motors wizard with props removed and battery connected. Click the spinning motor on the diagram to match physical motors to PX4's map. Safety first: props off.
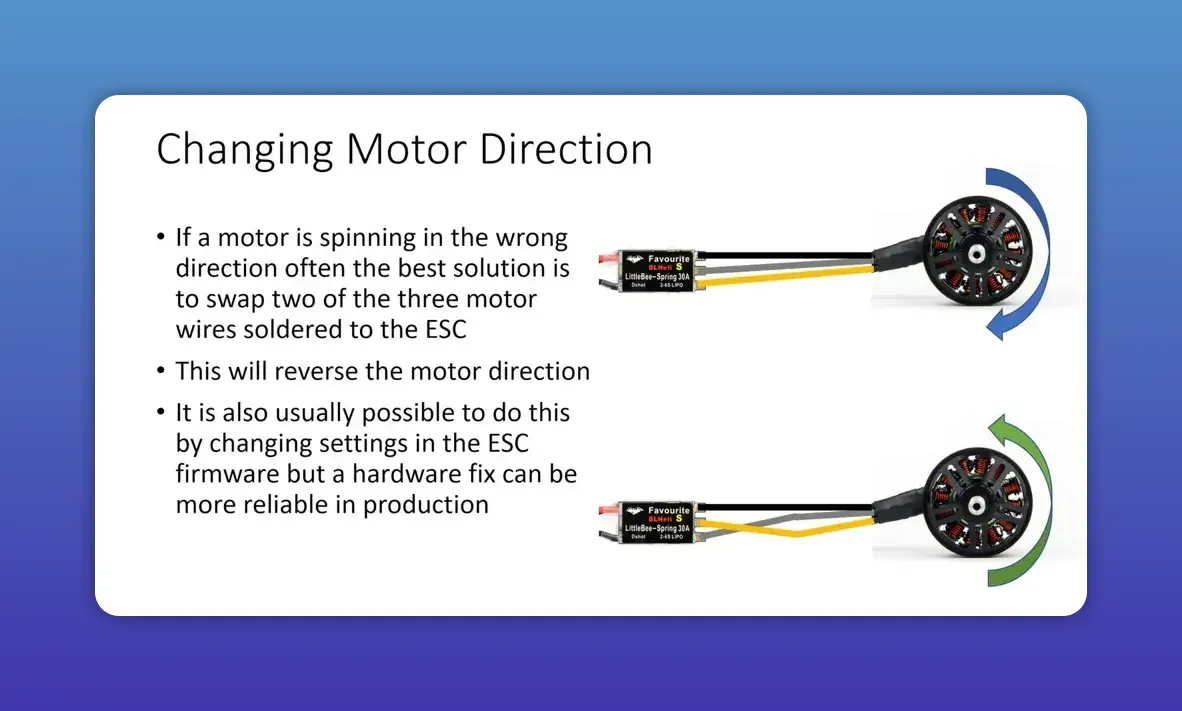
Motor direction and spin changes
Choose props-in (default) or props-out (better for aggressive coordinated turns). Set spin directions in QGC for DShot ESCs, or swap two motor wires to reverse a motor if you prefer hardware fixes.
Motor positions and geometry
Measure motor distances and set X/Y positions in the actuator tab. Accurate motor geometry gives PX4 the best chance of precise control and cleaner tuning later.
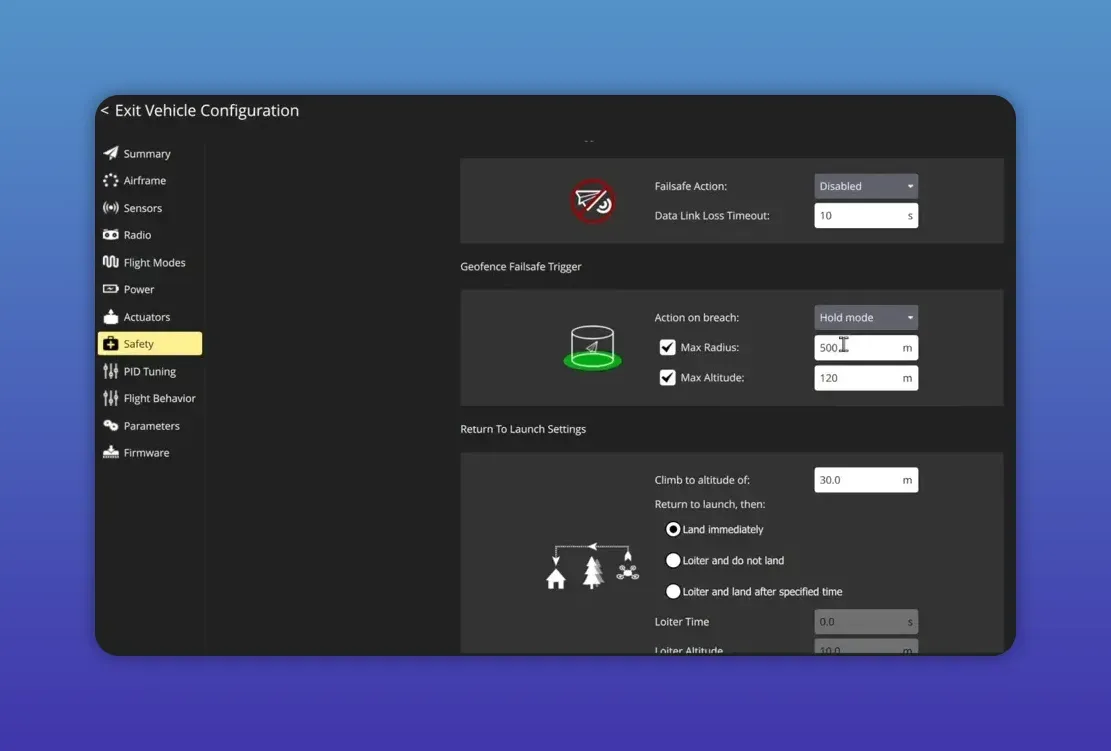
Safety tab — failsafes and geofence
Set low-battery warning, critical and emergency levels. I use defaults 15% warn, 7% critical (RTL), 5% emergency (land). Set RC loss to Return and data-link loss to no action unless telemetry is mission-critical.
Set a geofence. I pick 500m radius and 120m altitude for line-of-sight compliance. Configure RTL altitude high enough to clear obstacles, then land or loiter as your operation requires.
Ready for the first hover
With sensors calibrated, radio set, motors mapped and failsafes configured, your PX4 craft is ready for a tethered or short test hover. Use a kill switch. Keep props off until everything is double-checked.
Related reads and tools
Soldering tips for thick cables and ESCs:
How do I pick between PX4 and ArduPilot for hobby use?
Both work well for hobbyists. PX4 is slightly easier to use. ArduPilot has more niche features. Choose what fits your hardware and comfort level.
What protocol should I use for ESCs?
Use DShot 300 for PX4. It runs reliably and matches PX4's control loop timing. Avoid DShot 600 — it adds noise without benefit here.
Why did my receiver not show stick movement in QGC?
Power your transmitter before powering the drone. PX4 reads stick positions at boot. If the transmitter arrives late, PX4 may not detect it until reboot.
Can I change motor direction without resoldering?
Yes — DShot ESCs support spin direction changes in software. If your ESC doesn't, swap any two motor wires to reverse spin direction.
Takeaway box
Tweet-length nuggets for skimmers:
- PX4 needs QGroundControl. Download it before you touch the soldering iron.
- Wire devices to the expected UARTs. Reassigning UARTs is a time sink.
- Calibrate compass outdoors; remove metal jewellery and reboot after calibration.
- Use DShot 300 and set motor geometry for cleaner control and easier PID tuning.
- Arm switch and kill switch — non-negotiable for safe tuning flights.
This article was based from the video PX4 Ultimate Tuning Guide - Part 1: Setup

